主要内容
readPointCloud.
从LAS或LAZ文件中读取点云数据
句法
描述
Ptcloud.= readPointCloud(leasreader.)拉斯菲尔德尔对象并将其作为一个pointcloud.目的,Ptcloud.。
[读取指定的点属性,Ptcloud.那ptattributes.] = readPointCloud(leasreader.,'属性',PTATT.)PTATT.,来自LAS或LAZ文件。除了点云,函数还返回一个结构,ptattributes.,包含点云中的每个点的指定属性。
[___] = readPointCloud(___那除了先前语法中的任何参数组合之外,还使用一个或多个名称值对参数指定选项。例如,名称,价值)'roi'那[5 10 5 10 5 10]设置函数读取点云的感兴趣区域(ROI)。
例子
从Laz文件中读取点云数据
创建一个拉斯菲尔德尔Laz文件的对象。然后,使用readPointCloud.函数从LAZ文件中读取点云数据并生成一个pointcloud.目的。
创建一个拉斯菲尔德尔对象访问LAZ文件数据。
path = fullfile(toolboxdir('lidar'),'lidardata'那......'las'那'aeriallidardata.laz');Lasreader = Lasfilereader(路径);
使用Laz文件使用Laz文件读取点云数据readPointCloud.功能。
ptcloud = ReadPointCloud(Lasreader);
可视化点云。
图pcshow(ptcloud.location)

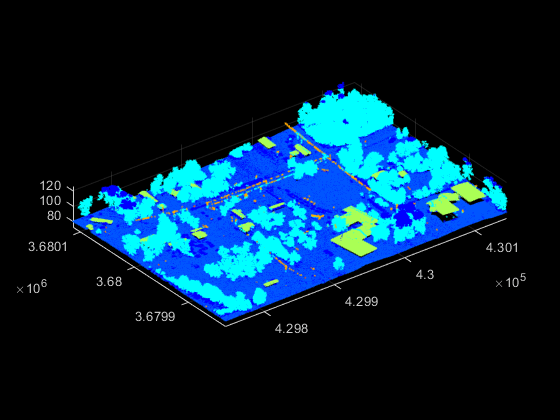
基于LAZ文件的分类数据可视化点云
基于来自LAZ文件的分类数据分离和可视化点云数据。
创建一个拉斯菲尔德尔对象从LAZ文件中访问数据。
path = fullfile(toolboxdir('lidar'),'lidardata'那......'las'那'aeriallidardata.laz');Lasreader = Lasfilereader(路径);
使用Laz文件使用Laz文件读取点云数据和关联的分类点属性readPointCloud.功能。
[ptcloud,pointAttributes] = ReadPointCloud(Lasreader,'属性'那'分类');
根据其分类属性为点颜色。
colordata =重塑(Label2RGB(PointAttributes.Classification),[],3);
可视化颜色编码点云。
图pcshow(ptcloud.location,colordata)
输入参数
输出参数
在R2020B中介绍
您还可以从以下列表中选择一个网站: