主要内容
自适应巡航控制系统
用模型预测控制器模拟自适应巡航控制
- 图书馆:
模型预测控制工具箱/自动驾驶
描述
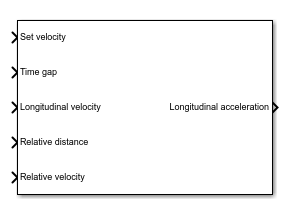
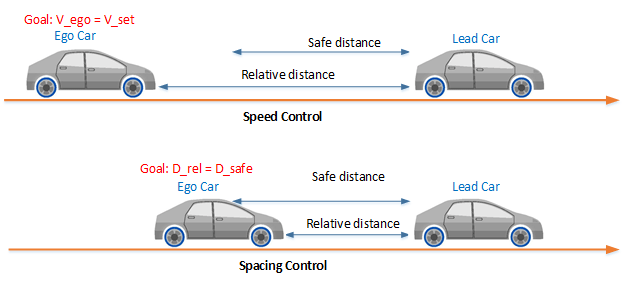
这自适应巡航控制系统块模拟追踪设定速度的自适应巡航控制(ACC)系统,通过调节EGO车辆的纵向加速来维持与铅车辆的安全距离。该块使用模型预测控制(MPC)来满足安全距离,速度和加速度约束的同时计算最佳控制动作。
要自定义控制器,例如使用高级MPC功能或修改控制器初始条件,单击创建ACC子系统.
港口
输入
输出
参数
算法
扩展能力
在R2018A介绍
您还可以从以下列表中选择一个网站:
