sim卡
模拟一个MPC控制器在闭环线性植物
语法
描述
使用模型预测控制工具箱™sim卡函数来模拟,在离散时间,闭环或开环反应的植物和约束和权重的MPC控制器在运行时不改变。MPC控制器可以隐式或显式,工厂必须线性定常控制,您必须指定参考提前和干扰信号。默认情况下,使用的植物模拟的mpcobj.Model.Plant,但是您可以使用一个不同的植物模型控制器鲁棒性评估模型不匹配。
运行仿真软件编万博1manbetx程模型相反,看到的sim卡(万博1manbetx模型)。
sim卡(___,指定额外的模拟选项。这个语法允许您更改默认的模拟选项,如初始状态、输入/输出噪声,和无边无际的干扰,植物不匹配等。它还允许您在开环模拟工厂。您可以使用SimOptions)SimOptions与任何以前的输入组合。
例子
模拟MPC控制味噌的植物
模拟味噌的MPC控制系统。系统有一个操纵变量,一个测量干扰,一个无边无际的扰动,和一个输出。
创造了连续时间模型。这种植物的预测模型将被用作MPC控制器。
sys = ss (tf ({1 1 1}、{[1 5 1], [1], [。7。5 1]}));
离散化植物模型使用的采样时间0.2单位。
t = 0.2;sysd =汇集(sys、Ts);
指定MPC信号类型的输入信号。
sysd = setmpcsignals(马里兰州sysd, MV = 1 = 2, UD = 3);
创建一个MPC控制器sysd工厂模式。使用默认值重量和视野。
mpcobj = mpc (sysd);
- - >“PredictionHorizon”是空的。假设默认10。- - >“ControlHorizon”是空的。假设默认2。- - >“权重。ManipulatedVariables”是空的。假设默认的0.00000。- - >“权重。ManipulatedVariablesRate”是空的。假设默认的0.10000。 -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
限制的被控变量[0 1]的范围内。
mpcobj。MV =结构(Min = 0, Max = 1);
指定仿真停止时间。
Tstop = 30;
定义参考信号和测量的干扰信号。
num_sim_steps =圆(Tstop / Ts);r = 1 (num_sim_steps, 1);v = [0 (num_sim_steps / 3,1);的(2 * num_sim_steps / 3,1)];
参考信号,r单位阶跃。测量的干扰信号,v是一个单位阶跃,10单位延迟。
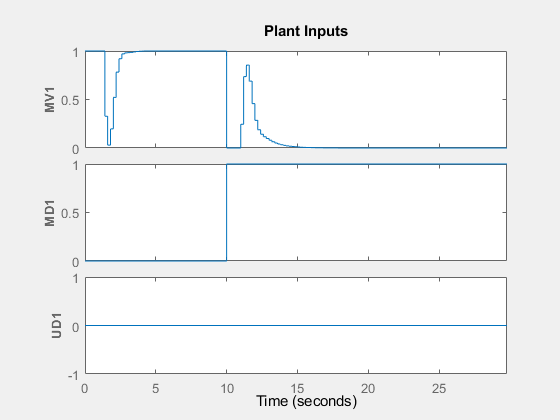
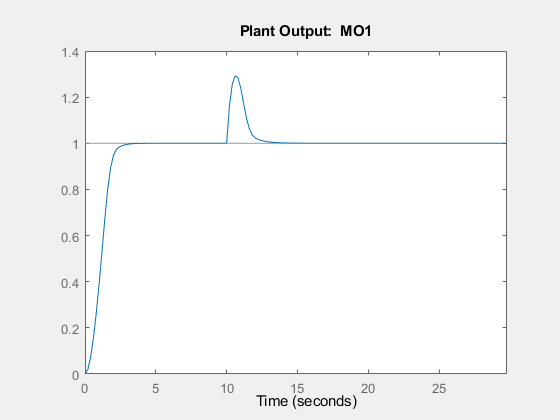
模拟控制器。
sim (mpcobj num_sim_steps, r, v)
- - >”模型。干扰”属性是空的:假设无边无际的输入扰动# 3是集成的白噪声。假设没有干扰# 1添加到测量输出。- - >”模型。噪音”是空的。假设白噪声在每个测量输出。
输入参数
输出参数
版本历史
之前介绍过的R2006a