主要内容
buildMEX
建立MEX文件,解决一个(通用或多级)非线性MPC控制问题
句法
描述
例子
用MEX文件模拟非线性MPC控制器
创建一个具有四个状态,两个输出和一个输入的非线性MPC控制器。
nlobj = nlmpc (4 2 1);
在标准代价函数中,默认情况下对一个或多个OVs应用零权,因为mv比OVs少。
指定采样时间和所述控制器的视野。
t = 0.1;nlobj。TS= Ts; nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 5;
在文件中指定控制器的状态函数pendulumDT0.m.该离散时间模型集成了定义的连续时间模型pendulumCT0.m使用多步前推欧拉法。
nlobj.Model.StateFcn =“pendulumDT0”;nlobj.Model.IsContinuousTime = FALSE;
预测模型使用的可选参数TS来表示采样时间。指定的参数的数量,并创建一个参数矢量。
nlobj.Model.NumberOfParameters = 1;params = {Ts};
指定模型的输出函数,将样本时间参数作为输入参数传递。
nlobj.Model.OutputFcn =“pendulumOutputFcn”;
定义为控制器标准约束。
nlobj.Weights.OutputVariables = [3 3];nlobj.Weights.ManipulatedVariablesRate = 0.1;nlobj.OV(1).Min = -10;nlobj.OV(1)最大= 10;nlobj.MV.Min = -100;nlobj.MV.Max = 100;
验证预测模型的功能。
X0 = [0.1; 0.2; -pi / 2; 0.3]。U0 = 0.4;validateFcns(nlobj,X0,U0,[],则params);
Model.StateFcn是OK。Model.OutputFcn是OK。用户提供的模型,成本和约束函数的分析完成。
只有两个工厂的状态是可测量的。因此,用于估计四种植物状态创建扩展卡尔曼滤波器。其状态转换函数定义在pendulumStateFcn.m和它的测量功能中所定义pendulumMeasurementFcn.m.
EKF = extendedKalmanFilter (@pendulumStateFcn @pendulumMeasurementFcn);
限定的初始条件为模拟,初始化扩展卡尔曼滤波器的状态,并指定一个零初始操纵变量的值。
x0 =[0, 0, -π;0];x0 y0 = (x0 (1); (3)];卡尔曼滤波器。状态= x0;mv0 = 0;
用于控制器创建代码生成数据结构,指定初始条件和参数。
[coreData, onlineData] = getCodeGenerationData (nlobj, x0、mv0 params);
在在线数据结构中指定输出参考值。
onlineData。Ref = [0 0];
构建MEX函数求解非线性MPC控制问题。该MEX函数是在当前工作目录中创建。
mexFcn = buildMEX (nlobj,“myController的”、coreData onlineData);
从非线性MPC生成MEX函数“myController”,加速仿真。代码生成成功。成功生成MEX函数“myController”。
运行下面的模拟10.秒。在每个控制间隔期间:
使用当前的测量值修正先前的预测。
计算最优控制移动使用MEX函数。该函数返回所计算的最佳序列中
onlineData.在下一个控制区间将更新的数据结构传递给MEX函数可以提供对最优序列的初始猜测。预测模型状态。
应用首先计算最优控制转移到工厂,更新设备的状态。
产生带有白噪声的传感器数据。
拯救植物状态。
MV = MV0;Y = Y0;X = X0;持续时间= 10;xHistory = X0;为了CT = 1:(持续时间/ Ts)的%正确先前预测xk =正确(卡尔曼滤波器,y);%计算最优控制移动[MV,onlineData] = myController的(XK,MV,onlineData);% Predict下一次迭代的预测模型状态预测(卡尔曼滤波器,[mv;Ts]);%首次实现最优控制的举动x = pendulumDT0 (x, mv, Ts);%生成的传感器数据Y = X([1 3])+ randn(2,1)* 0.01;%保存植物状态xHistory = [xHistory x];结束
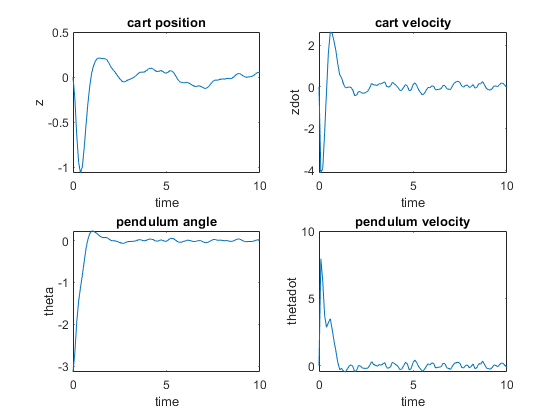
绘制结果状态轨迹。
图副区(2,2,1)情节(0:TS:持续时间,xHistory(1,:))xlabel('时间') ylabel (“z”)标题(“车位置”) subplot(2,2,2) plot(0:Ts:Duration,xHistory(2,:))'时间') ylabel ('zdot')标题(“车速度”)子plot(0,2,3) plot(0:Ts:Duration,xHistory(3,:))'时间') ylabel (“θ”)标题(“摆角”)副区(2,2,4)情节(0:TS:持续时间,xHistory(4,:))xlabel('时间') ylabel ('thetadot')标题(“摆速度”)
输入参数
输出参数
介绍了R2020a
你也可以从以下列表中选择一个网站:
