调整干扰和噪声模型
模型预测控制器需要以下拒绝未知干扰有效:
特定于应用程序的干扰模型
测量反馈更新控制器状态估计
您可以修改输入和输出扰动模型和测量噪声模型使用MPC设计师应用程序和命令行。然后您可以调整控制器优化权重提高抗干扰性。
概述
货币政策委员会试图预测已知和未知事件如何影响植物输出变量(ov)。已知事件的变化测量植物输入变量(MV和MD输入)。控制器的工厂模型预测这些事件的影响,这样的预测是非常准确的。有关更多信息,请参见货币政策委员会预测模型。
未知事件的影响表现为错误的预测已知的事件。根据定义,这些错误是无法预测准确。然而,预测趋势的能力可以提高抗干扰性。例如,假设在near-steady控制系统操作条件和所有测量机汇附近的预测价值。没有已知的事件,但是一个或多个ov突然偏离了其预测。控制器干扰和测量噪声模型允许您提供指导如何处理这些错误。
输出扰动模型
假设您的植物模型不包含不可测量的干扰输入。MPC控制器然后使用一个模型未知的事件输出扰动模型。所示货币政策委员会预测模型,输出扰动模型是独立于工厂,和它的输出直接添加到植物的模型。
使用MPC设计师,您可以指定类型的噪声将影响每个植物机汇。在应用,调优选项卡,设计部分中,点击评估模型>输出扰动模型。在输出扰动模型对话框,更新模型下拉列表中,选择指定一个自定义模型通道的通道。
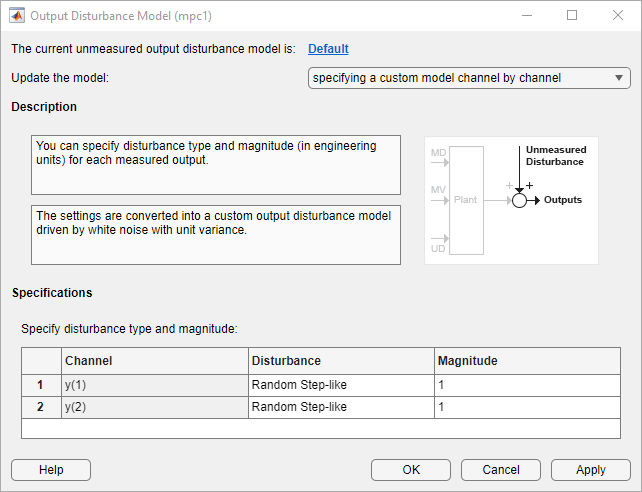
在规范的部分,干扰列,选择一个下面的扰动模型为每个输出:
白噪声——预测错误是由于随机零均值白噪声。这个选项意味着扰动的影响是短暂的,因此需要一个温和,短期控制器响应。随机的状——预测错误是由于随机状扰动,无限期持续,维护一个常数级左右。这种干扰需要一个更积极的、持续的控制器响应。随机Ramp-like——预测错误是由于随机ramp-like扰动,无限期持续,往往会随着时间的增长。这样一个扰动控制器需要一个更积极的响应。
模型预测控制工具箱™软件代表每个干扰类型作为一个白噪声模型,零均值和方差单位,输入输出动态系统由下列之一:
一个静态增益——白噪声干扰
一个积分器串联一个静态增益-状干扰
两个集成商与静态增益系列——ramp-like扰动
您还可以指定白噪声输入级对于每一个扰动模型,覆盖单元方差的假设。当你增加噪声级,控制器响应更积极地给定的预测误差。指定的噪声级对应的静态增益输出模型为每个类型的噪声。
您还可以查看或修改使用从命令行输出扰动模型getoutdist和setoutdist分别。
测量噪声模型
MPC也试图区分干扰,这需要一个控制器响应,从测量噪声控制器应该忽略。使用MPC设计师,您可以指定预期的测量噪声级和性格。在应用,调优选项卡,设计部分中,点击评估模型>测量噪声模型。在模型噪声模型对话框更新模型下拉列表中,选择指定一个自定义模型通道的通道。
在规范的部分,干扰列,选择每个测量输出通道的噪声模型。噪音选项是一样的输出扰动模型的选择。

白噪声是默认选项,在几乎所有的应用程序中,应该提供足够的性能。
控制器包含一个测量噪声模型时,考虑每个预测误差的干扰和噪声影响。定性,当你增加指定的噪音级控制器属性每个预测误差噪声,一个更大的部分,它反应不积极。最终,控制器停止响应预测错误,只改变其MVs当你改变OV或MV参考信号。
输入扰动模型
当你的植物模型包括无边无际的干扰(UD)输入,控制器可以使用一个输入扰动模型除了标准输出扰动模型。前者提供了更大的灵活性,默认是自动生成的。如果选择输入扰动模型不允许完全消除持续干扰的出现,还添加了默认输出扰动模型。
所示货币政策委员会预测模型,输入扰动模型由一个或多个白噪声信号,与单位和零均值,方差进入一个动态系统。这个系统的输出是UD输入工厂模型。输入与输出扰动模型,扰动影响植物输出以更复杂的方式通过植物动力学模型。
与输出扰动模型,您可以使用MPC设计师指定类型的扰动为每个UD输入你希望。在应用,调优选项卡,设计部分中,点击评估模型>输入扰动模型。在对话框中输入扰动模型,更新模型下拉列表中,选择指定一个自定义模型通道的通道。
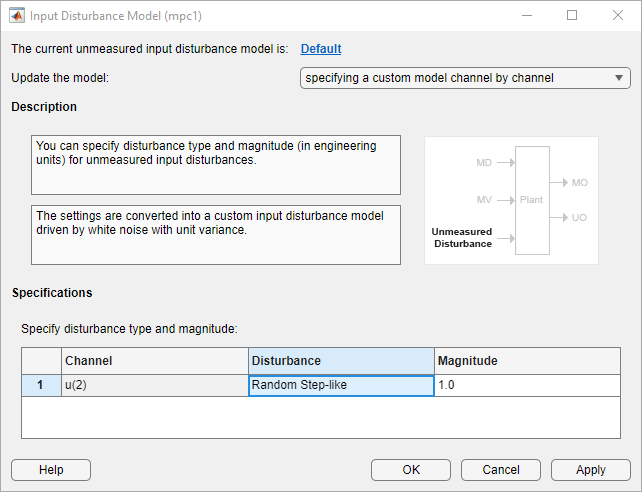
在规范的部分,干扰列,选择每个测量输出通道的噪声模型。输入扰动模型选项是一样的输出扰动模型的选择。
通常的做法是将模型未知事件干扰增加植物MVs。这些障碍,称为负载扰动在很多文本,是现实的某种未知事件故障设置的MVs值要求的控制器。您可以创建一个负载扰动模型如下:
首先一个LTI工厂模型,
植物,所有输入(MVs和MDs)。获得了状态矩阵
植物。例如:[A, B, C, D] = ssdata(植物);
假设有nuMVs。集Bu=列BMVs对应。同时,设置Du=列DMVs对应。
重新定义包括植物模型nu额外的输入。例如:
工厂。B= [B Bu]; Plant.D = [D Du]);
表明新输入是无边无际的障碍,使用
setmpcsignals,或一组Plant.InputGroup财产。
这个过程增加了负载扰动输入不增加植物模型的状态数。
默认情况下,给定一个植物包含负载扰动模型,该模型预测控制工具箱软件创建一个输入扰动模型生成nym梯状负载扰动。如果nym>nu,它还创建了一个输出扰动模型集成白噪声增加(nym- - - - - -nu)测量输出。如果nym<nu最后一个(nu- - - - - -nym默认情况下)负载干扰为零。您可以修改这些默认值使用MPC设计师。
限制
讨论了在控制器状态估计,植物、干扰和噪声模型相结合,形成了状态观测器,必须使用测量装置输出检测。如果没有,软件显示一个命令窗口错误消息,当你试图使用控制器。
这种限制限制了干扰和噪声模型的形式。如果比白噪声模型被定义为任何其他的静态增益,他们的模型状态必须检测。例如,一个集成的白噪声干扰增加一个无边无际的OV也无法察觉。MPC设计师阻止你选择这样一个模型。同样,测量扰动的数量,nym,限制了数量的梯状UD输入从输入扰动模型。
默认情况下,模型预测控制工具箱软件创建可检测模型。如果你修改默认的假设(或更改nym),遇到错误检测能力,可以恢复到默认情况下。
抗干扰性优化
在设计过程中,您可以调整控制器的抗干扰性能。
任何控制器调优之前,定义每个工厂的规模因素(见输入和输出变量指定规模因素)。在干扰和噪声的背景下建模,这使得unit-variance白噪声输入的默认假设更容易产生良好的性能。
最初,保持默认配置的干扰模型。
优化代价函数的权重(见后调整权重),测试控制器响应一个无边无际的扰动输入其他核电站比扰动步输出。具体地说,如果你的工厂模型包括UD输入,使用一个或多个模拟干扰。否则,模拟一个或多个负载干扰,即干扰了一步添加到指定的MV。这两个MPC设计师和
sim卡命令支持这样的模万博1manbetx拟。如果模拟的反应过于迟缓,尝试下列一个或多个生产更激进的抗干扰性:
所有扰动模型收益增加一个乘法因子。在MPC设计师,通过增加每个干扰的大小。如果这有助于但不足,进一步增加大小。
降低测量噪声收益倍增因子。在MPC设计师,通过增加测量噪声级。如果这有助于但不足,进一步增加大小。
在MPC设计师,在调优选项卡,将状态估计向右滑动。朝着快状态估计干扰同时增加收益模型和噪声模型降低了收益。

如果这有助于但不足,向右拖动滑块进一步。
改变一个或多个扰动模型,控制器需要一个更积极的响应。例如,更改模型从白噪声干扰到梯状干扰。
请注意
以这种方式改变干扰增加国家干扰模型,这可能会导致侵犯的状态观测器检测能力限制。
如果响应是过于激进,特别是,如果控制器并不健壮的已知事件的预测不准确时,试着扭转先前的调整。

