insSensor
惯性导航系统和GNSS / GPS仿真模型
描述
的insSensor系统对象™模型设备,融合测量从一个惯性导航系统(INS)和全球导航卫星系统(GNSS)如GPS、并输出融合测量。
输出融合INS和GNSS测量:
创建
insSensor对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
属性
使用
描述
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
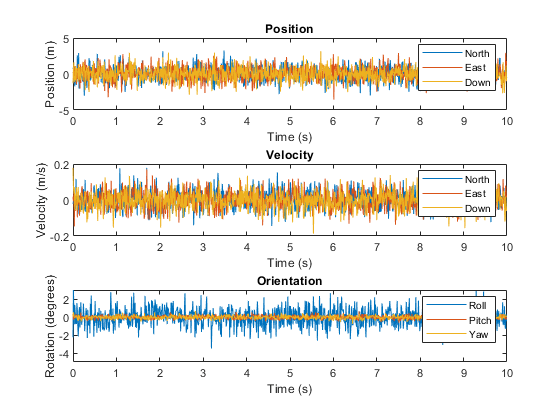
从静止的输入生成INS测量
创建一个动态结构,定义了一个固定位置在当地north-east-down (NED)的起源。因为这个平台是静止的,你只需要定义一个样本。假设真实运动采样10秒100 Hz采样率。创建一个默认的insSensor系统对象™。Preallocate变量来保存的输出insSensor对象。
Fs = 100;时间= 10;numSamples = f *时间;运动=结构(…“位置”,0 (1、3)…“速度”,0 (1、3)…“定位”,(1,1,“四元数”));INS = insSensor;positionMeasurements = 0 (numSamples, 3);velocityMeasurements = 0 (numSamples, 3);orientationMeasurements = 0 (numSamples 1“四元数”);
在一个循环中,调用INS运动与静止的结构返回位置,速度,在当地NED和方向测量坐标系统。日志的位置、速度和姿态测量。
为=我= 1:numSamples测量INS(运动);:positionMeasurements(我)= measurements.Position;:velocityMeasurements(我)= measurements.Velocity;orientationMeasurements (i) = measurements.Orientation;结束
从四元数与欧拉角转换方向可视化的目的。情节的位置、速度和方向测量。
orientationMeasurements = eulerd (orientationMeasurements,“ZYX股票”,“帧”);t = (0: (numSamples-1)) / Fs;次要情节(1,1)情节(t, positionMeasurements)标题(“位置”)包含(“时间(s)”)ylabel (“位置(m)”)传说(“北”,“东”,“下来”次要情节(3、1、2)情节(t, velocityMeasurements)标题(“速度”)包含(“时间(s)”)ylabel (“速度(米/秒)”)传说(“北”,“东”,“下来”次要情节(3,1,3)情节(t, orientationMeasurements)标题(“定位”)包含(“时间(s)”)ylabel (的旋转(度))传说(“滚”,“节”,“偏航”)
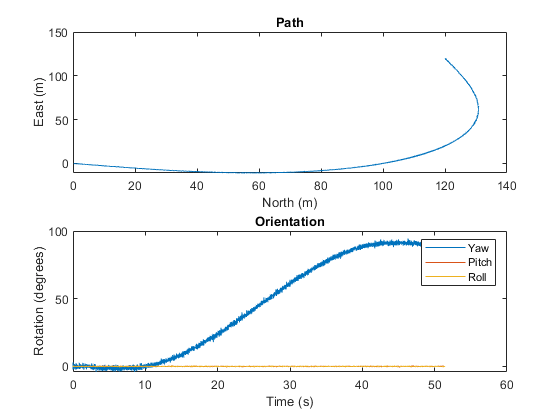
为将生成INS测量平台
生成INS测量使用insSensor系统对象™。使用waypointTrajectory生成真实的道路。
指定一个真实取向,从传感器的身体开始x设在北部和结尾与传感器的身体x设在与东方。指定路径点弧形轨迹和到场时间向量对应的锚点。使用一个100 Hz采样率。创建一个waypointTrajectory系统对象的路径约束和设置SamplesPerFrame这整个轨迹输出一个电话。
eulerAngles = [0, 0, 0;…0,0,0;…90年,0,0;…90年,0,0);取向=四元数(eulerAngles,“eulerd”,“ZYX股票”,“帧”);r = 20;路点= [0,0,0;…100年,0,0;…100 + r, r, 0;…100 + r, 100 + r, 0);toa =[0、10、10 +(2 *π* r / 4), 20 +(2 *π* r / 4)];Fs = 100;numSamples =地板(Fs * toa(结束));路径= waypointTrajectory (“锚点”锚点,…“TimeOfArrival”toa,…“定位”取向,…“SampleRate”Fs,…“SamplesPerFrame”,numSamples);
创建一个insSensor系统接收INS数据对象模型。设置PositionAccuracy来0.1。
ins = insSensor (“PositionAccuracy”,0.1);
调用路径轨迹对象,路径真实,产生运动。叫INS模拟器,ins真实的运动生成INS测量。
[motion.Position, motion.Orientation,运动。速度]=路径();insMeas = ins(运动);
转换返回的取向ins欧拉角的度可视化的目的。随着时间的推移图的完整路径和方向。
orientationMeasurementEuler = eulerd (insMeas.Orientation,“ZYX股票”,“帧”);次要情节(2,1,1)情节(insMeas.Position (: 1), insMeas.Position (:, 2));标题(“路径”)包含(“北(m)”)ylabel (“东(m)”次要情节(2,1,2)t = (0: (numSamples-1)。/ Fs;情节(t, orientationMeasurementEuler (: 1),…t, orientationMeasurementEuler (:, 2),…t, orientationMeasurementEuler (:, 3));标题(“定位”)传说(“偏航”,“节”,“滚”)包含(“时间(s)”)ylabel (的旋转(度))