扰动
语法
描述
扰乱=扰动(obj,财产“TruncatedNormal”,的意思是,偏差,lowerLimit,upperLimit)财产微扰抵消来自正态分布与指定的意思是、标准偏差、下限和上限。
扰乱=扰动(obj,财产“自定义”,perturbFcn)perturbFcn,吸引了扰动补偿值。
例子
默认的扰动的性质waypointTrajectory
创建一个waypointTrajectory对象。
traj = waypointTrajectory;
显示默认使用扰动特性扰动方法。
扰乱=扰动(traj)
扰乱=2×3表属性类型值售予______ _____________“锚点”“没有”{(南)}{(南)}“TimeOfArrival”“没有”{(南)}{(南)}
扰乱insSensor精度
创建一个insSensor对象。
传感器= insSensor
传感器与属性= insSensor: MountingLocation: [0 0 0] m RollAccuracy: 0.2度PitchAccuracy: 0.2度YawAccuracy: 1度PositionAccuracy: (1 1 1) m VelocityAccuracy: 0.05 m / s AccelerationAccuracy: 0 m / s²AngularVelocityAccuracy: 0度/ s TimeInput: 0 RandomStream:“全球流”
定义上的扰动RollAccuracy属性三个值等于每个可能性。
值= {0.1 0.2 0.3}
值=1×3单元阵列{[0.1000]}{[0.2000]}{[0.3000]}
概率= (1/3 1/3 1/3)
概率=1×30.3333 0.3333 0.3333
扰动(传感器,“RollAccuracy”,“选择”、价值观、概率)
ans =7×3表属性类型值_________________________ ___________ ______________________________________“RollAccuracy”“选择”{1 x3细胞}{[0.3333 0.3333 0.3333]}“PitchAccuracy”“没有”{(南)}{(南)}“YawAccuracy”“没有”{(南)}{(南)}“PositionAccuracy”“没有”{(南)}{(南)}“VelocityAccuracy”“没有”{(南)}{(南)}“AccelerationAccuracy”“没有”{(南)}{(南)}“AngularVelocityAccuracy”“没有”{(南)}{(南)}
扰乱的传感器对象使用扰乱函数。
rng(2020)扰乱(传感器);传感器
传感器与属性= insSensor: MountingLocation: [0 0 0] m RollAccuracy: 0.5度PitchAccuracy: 0.2度YawAccuracy: 1度PositionAccuracy: (1 1 1) m VelocityAccuracy: 0.05 m / s AccelerationAccuracy: 0 m / s²AngularVelocityAccuracy: 0度/ s TimeInput: 0 RandomStream:“全球流”
的RollAccuracy是摄动0.5度。
扰乱路径轨迹
定义一个航点轨迹。默认情况下,这个轨迹包含两个锚点。
traj = waypointTrajectory
traj = waypointTrajectory属性:SampleRate: 100 SamplesPerFrame: 1路点:[2 x3双]TimeOfArrival: [2 x1双]速度:[2 x3双]:[2 x1双]水平:[2 x1双]ClimbRate: [2 x1双]取向:[2 x1四元数]AutoPitch: 0 AutoBank: 0 ReferenceFrame:“内德”
定义扰动路点财产和TimeOfArrival财产。
rng (2020);perturbs1 =扰动(traj,“锚点”,“正常”,1,1)
perturbs1 =2×3表属性类型值售予________ _____________“锚点”“正常”{[1]}{[1]}“TimeOfArrival”“没有”{(南)}{(南)}
perturbs2 =扰动(traj,“TimeOfArrival”,“选择”,{[0,1],[0;2]})
perturbs2 =2×3表属性类型值售予___________ _______________________________“锚点”“正常”{[1]}{[1]}“TimeOfArrival”“选择”{1 x2细胞}{[0.5000 - 0.5000]}
扰乱的轨迹。
偏移量=扰乱(traj)
偏移量=2×1结构体数组字段:财产抵消PerturbedValue
的路点财产和TimeOfArrival财产已经改变了。
traj.Waypoints
ans =2×31.8674 1.0203 0.7032 2.3154 -0.3207 0.0999
traj.TimeOfArrival
ans =2×10 2
扰乱imuSensor参数
创建一个imuSensor对象并显示其perturbable属性。
imu = imuSensor;扰动(imu)
ans =17×3表属性类型价值______________________________________ ______ _____________”加速度计。MeasurementRange”“没有”{(南)}{(南)}”加速度计。决议”“没有”{(南)}{(南)}”加速度计。ConstantBias”“没有”{(南)}{(南)}”加速度计。NoiseDensity”“没有”{(南)}{(南)}”加速度计。BiasInstability”“没有”{(南)}{(南)}”加速度计。随机散步”“没有”{(南)}{(南)}”加速度计。TemperatureBias”“没有”{(南)}{(南)}”加速度计。TemperatureScaleFactor”“没有”{(南)}{(南)}”陀螺仪。MeasurementRange”“没有”{(南)}{(南)}”陀螺仪。决议”“没有”{(南)}{(南)}”陀螺仪。ConstantBias”“没有”{(南)}{(南)}”陀螺仪。NoiseDensity”“没有”{(南)}{(南)}”陀螺仪。BiasInstability”“没有”{(南)}{(南)}”陀螺仪。随机散步”“没有”{(南)}{(南)}”陀螺仪。TemperatureBias”“没有”{(南)}{(南)}”陀螺仪。TemperatureScaleFactor”“没有”{(南)}{(南)}⋮
指定的扰动NoiseDensity加速度计作为一种均匀分布的性质。
扰动(imu,“Accelerometer.NoiseDensity”,…“统一”1 e-5 1 e - 3);
指定的扰动随机散步陀螺仪作为截断正态分布的性质。
专家们=扰动(imu,“Gyroscope.RandomWalk”,…“TruncatedNormal”2 1 e-5 0正);
录制好的IMU数据加载。
负载imuSensorData.matnumSamples =大小(方向);
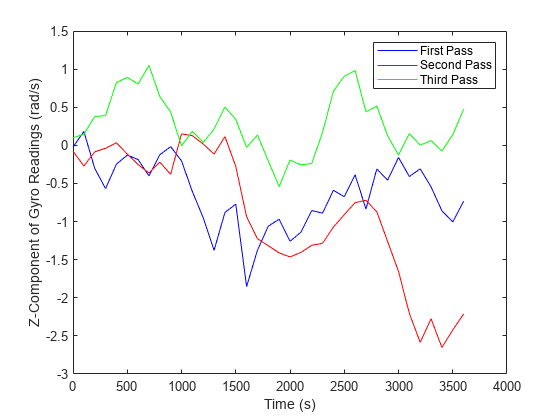
模拟imuSensor三次不同的扰动实现。
rng (2021);%的可重复的结果numRuns = 3;颜色= [“b”“r”‘g’];为idx = 1: numRuns%克隆IMU保持原始值imuCopy =克隆(imu);%扰乱噪声值偏移量=扰乱(imuCopy);%获得测量[accelReadings, gyroReadings] = imuCopy(加速度、angularVelocities方向);%绘制结果情节(次gyroReadings(:, 3),颜色(idx));持有在;结束包含(“时间(s)”)ylabel (陀螺的z -阅读(rad / s) ')传说(“第一次”,“第二传递”,“第三通过”);持有从
输入参数
输出参数
更多关于
指定扰动分布
您可以指定扰动的分布应用于一个特定的属性。
选择分布的函数定义了扰动补偿的指定值相关的概率。例如,如果您指定的值
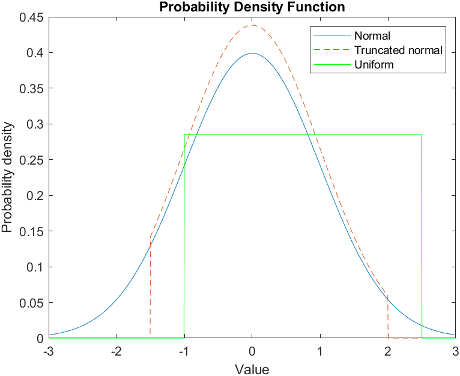
(1 2)并指定的概率(0.7 - 0.3),那么扰乱函数添加一个抵消的价值1属性的概率0.7并添加一个偏移量的价值2属性的概率0.3。使用选择当你只是想扰乱财产分配的离散值的数量。正态分布的函数定义了微扰抵消来自正态分布值与指定的平均值和标准偏差(或协方差)。正态分布是最常用的分布,因为它在大多数情况下模拟的自然扰动参数。
截断正态分布的函数定义了扰动补偿作为一个值从一个截断正态分布与指定的意思是,标准偏差(或协方差),下限和上限。不同于正态分布,来自一个截断正态分布值截断的上下极限。使用截断正态分布当你想应用正态分布,但属性的有效值是局限在一个时间间隔。
均匀分布的函数定义了扰动补偿作为一个值从一个均匀分布与指定的最小和最大值。中的所有值区间(指定的最小值和最大值)实现的概率相同。
自定义分布——定制你自己的摄动函数。函数必须有这样的语法:
在哪里抵消= myfun (propVal)
propVal的价值吗财产和抵消的扰动补偿的财产。
这个图显示了一个正态分布的概率密度函数,一个截断正态分布和均匀分布,分别。
版本历史
介绍了R2020b