waypointTrajectory
路径轨迹发生器
描述
的waypointTrajectory系统对象™使用指定的路径点生成轨迹。当您创建System对象时,您可以选择指定每个路径点的到达时间、速度和方向。看到算法为更多的细节。
从路径点生成轨迹:
创建
waypointTrajectory对象,并设置其属性。像调用函数一样调用对象。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?.
创建
语法
描述
轨迹= waypointTrajectory轨迹,它根据默认的固定路径点生成轨迹。
轨迹= waypointTrajectory (路点,TimeOfArrival)路点生成的轨迹经过TimeOfArrival在每一个路标。
轨迹= waypointTrajectory (路点,TimeOfArrival,名称,值)的名字到指定的价值.未指定的属性和创建参数具有默认值或推断值。
轨迹= waypointTrajectory([10 10 0; 20日20日0;20日20日10],[0,0.5,10])创建一个路径点轨迹系统对象,轨迹,从航路点开始[10 10 0],然后穿过[20,20,0]0.5秒后[20,20,10]后10秒。
创建参数
创建参数是在创建System对象期间设置的属性,以后不能修改。如果没有显式设置创建参数值,则推断属性值。
如果指定任何创建参数,则必须同时指定路点和TimeOfArrival创建参数。您可以指定路点和TimeOfArrival作为仅值参数或名称-值对。
属性
使用
输出参数
对象的功能
要使用对象函数,请指定System对象作为第一个输入参数。例如,释放名为system的对象的系统资源obj,使用此语法:
发行版(obj)
例子
创建默认的waypointTrajectory
轨迹= waypointTrajectory
轨迹= waypointTrajectory with properties: SampleRate: 100 SamplesPerFrame: 1 Waypoints: [2x3 double] TimeOfArrival: [2x1 double] velocity: [2x3 double] Course: [2x1 double] GroundSpeed: [2x1 double] ClimbRate: [2x1 double] Orientation: [2x1 quaternion] AutoPitch: 0 AutoBank: 0 ReferenceFrame: 'NED'
通过调用来检查默认的路径点和到达时间waypointInfo.默认情况下,路径点指示一个静止位置,持续1秒。
waypointInfo(轨迹)
ans =2×2表TimeOfArrival锚点 _____________ ___________ 0 0 0 0 1 0 0 0
创建广场轨迹
创建一个方形轨迹并检查路径点约束、采样率和生成的轨迹之间的关系。
通过定义正方形的顶点来创建正方形轨迹。定义每个路径点的方向指向运动的方向。指定1hz的采样率并使用默认值SamplesPerframe.为1。
路点= [0,0,0;...%初始位置0 1 0;...1 1 0;...1,0,0;...0, 0, 0);%最终位置toa = 0:4;到达时间百分比取向=四元数([0,0,0;...45 0 0;...135年,0,0;...225年,0,0;...0, 0, 0),...“eulerd”,“ZYX股票”,“帧”);轨迹= waypointTrajectory(锚点,...“TimeOfArrival”toa,...“定位”取向,...“SampleRate”1);
创建图形并绘制平台的初始位置。
图(1)情节(锚点(1,- 1),锚点(1、2)," b *’)标题(“位置”)轴([1、2、1、2])轴广场包含(“X”) ylabel (“Y”网格)在持有在
在回路中,步进通过轨迹输出当前位置和电流方向。绘制当前位置并记录方向。使用暂停模拟实时处理。
OrientationLog = Zeros(TOA(结束)*轨迹。Samplege,1,“四元数”);数= 1;而~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); / /当前位置currentPosition的情节(currentPosition (1), (2),'博') pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1;结束持有从
将方向四元数转换为易于解释的欧拉角,然后绘制随时间变化的方向。
图(2)eulerAngles = eulerd([orientation(1);orientationLog],“ZYX股票”,“帧”);情节(toa, eulerAngles (: 1),“柯”,...toa, eulerAngles (:, 2),“bd”,...toa, eulerAngles (:, 3),“r”。);标题(的方向随时间变化)传说(绕z轴旋转的,绕轴旋转的,绕轴旋转的)包含('时间(秒)') ylabel (的旋转(度)网格)在

到目前为止,轨迹对象只输出了在构造过程中指定的路点。为了在路径点之间插入,增加采样率,使其速度快于路径点到达的时间。设置轨迹采样率为100赫兹和呼叫重置.
轨迹。SampleRate= 100; reset(trajectory)
创建图形并绘制平台的初始位置。在回路中,步进通过轨迹输出当前位置和电流方向。绘制当前位置并记录方向。使用暂停模拟实时处理。
图(1)情节(锚点(1,- 1),锚点(1、2)," b *’)标题(“位置”)轴([1、2、1、2])轴广场包含(“X”) ylabel (“Y”网格)在持有在OrientationLog = Zeros(TOA(结束)*轨迹。Samplege,1,“四元数”);数= 1;而~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); / /当前位置currentPosition的情节(currentPosition (1), (2),'博') pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1;结束持有从
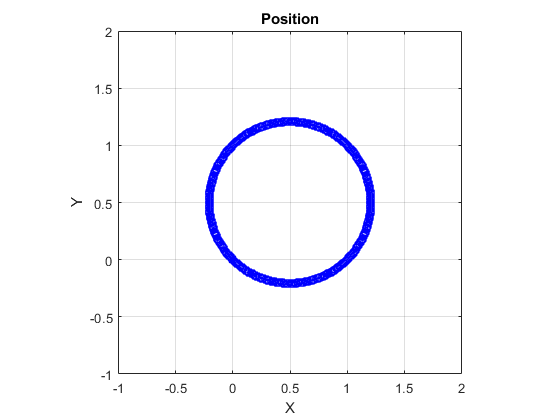
现在输出的轨迹是圆形的。这是因为waypointTrajectory系统对象™最小化加速度和角速度时,插值,这导致平滑,更现实的运动在大多数情况下。
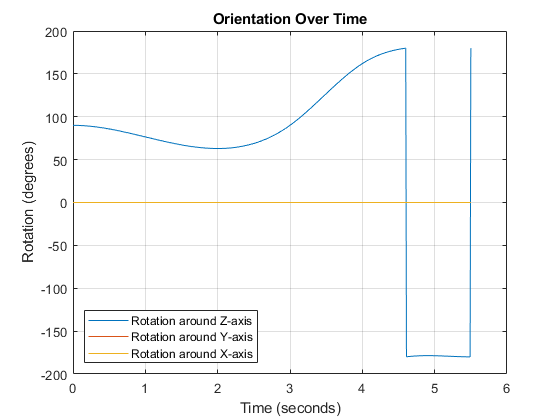
将方向四元数转换为易于解释的欧拉角,然后绘制随时间变化的方向。方向也是插值的。
图(2)eulerAngles = eulerd([orientation(1);orientationLog],“ZYX股票”,“帧”);t = 0:1 / trajectory.SampleRate: 4;情节(t, eulerAngles (: 1),“柯”,...t, eulerAngles (:, 2),“bd”,...t, eulerAngles (:, 3),“r”。);标题(的方向随时间变化)传说(绕z轴旋转的,绕轴旋转的,绕轴旋转的)包含('时间(秒)') ylabel (的旋转(度)网格)在

的waypointTrajectory算法插值路径点,以创建一个平滑的轨迹。为了回到方形轨道,提供更多的路径点,特别是在急剧变化的周围。要跟踪相应的时间、路径点和方向,在一个矩阵中指定所有的轨迹信息。
时间,路标,方向轨迹= [0,0,0,0,0,0,0;...%初始位置0.1, 0, 0.1, 0, 0, 0, 0;...0.9, 0, 0.9, 0, 0, 0, 0;...1, 0, 1, 0, 45岁,0,0;...1.1, 0.1, 1 0 90, 0, 0;...1.9, 0.9, 1 0 90, 0, 0;...135年2 1 1 0,0,0;...2.1、1、0.9,0,180,0,0;...2.9、1、0.1,0,180,0,0;...3、1 0 0 225 0,0;...270年3.1,0.9,0,0,0,0;...270年3.9,0.1,0,0,0,0;...4, 0, 0, 0, 270, 0, 0);%最终位置轨迹= waypointTrajectory (trajectoryInfo (: 2:4)...“TimeOfArrival”trajectoryInfo (: 1),...“定位”四元数(trajectoryInfo(:, 5:结束),“eulerd”,“ZYX股票”,“帧”),...“SampleRate”,100);
创建图形并绘制平台的初始位置。在回路中,步进通过轨迹输出当前位置和电流方向。绘制当前位置并记录方向。使用暂停模拟实时处理。
图(1)情节(锚点(1,- 1),锚点(1、2)," b *’)标题(“位置”)轴([1、2、1、2])轴广场包含(“X”) ylabel (“Y”网格)在持有在OrientationLog = Zeros(TOA(结束)*轨迹。Samplege,1,“四元数”);数= 1;而~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); / /当前位置currentPosition的情节(currentPosition (1), (2),'博') pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count+1;结束持有从

轨迹输出现在看起来更像正方形,特别是在带有路径点的顶点周围。
将方向四元数转换为易于解释的欧拉角,然后绘制随时间变化的方向。
图(2)eulerAngles = eulerd([orientation(1);orientationLog],“ZYX股票”,“帧”);t = 0:1 / trajectory.SampleRate: 4;eulerAngles =情节(t, eulerAngles (: 1),“柯”,...t, eulerAngles (:, 2),“bd”,...t, eulerAngles (:, 3),“r”。);标题(的方向随时间变化)传说(绕z轴旋转的,...绕轴旋转的,...绕轴旋转的,...“位置”,“西南”)包含('时间(秒)') ylabel (的旋转(度)网格)在

创建圆弧轨迹
这个例子展示了如何创建一个圆弧轨迹使用waypointTrajectory系统对象™。waypointTrajectory通过指定的路径点创建路径,使加速度和角速度最小化。创建弧轨迹后,将轨迹限制在预设的范围内。
创建一个圆弧轨迹
定义一个由航迹点、到达时间和方向组成的约束矩阵。生成的轨迹以指定的方向在指定的时间通过路径点。的waypointTrajectory系统对象需要使用四元数或旋转矩阵指定方向。将保存在约束矩阵中的欧拉角转换为四元数取向财产。
到达,路标,方向约束条件= [0,20,20,0,90,0,0;3、50、20、0 90 0,0;4, 58岁,15.5,0 162 0,0;180年5.5,59.5,0,0,0,0);轨迹= waypointTrajectory(约束(:2:4)...“TimeOfArrival”约束(:1),...“定位”四元数(约束(:,前书5章7节)“eulerd”,“ZYX股票”,“帧”));
调用waypointInfo在轨迹返回指定约束的表。创建属性路点,TimeOfArrival,取向是表格的变量。该表方便在绘制时索引。
tInfo = waypointInfo(轨迹)
tInfo = 4x3 table TimeOfArrival Waypoints Orientation _____________ ____________________ ________________ 0 20 20 0 {1x1四元数}3 50 20 0 {1x1四元数}4 58 15.5 0 {1x1四元数}5.5 59.5 0 0 {1x1四元数}
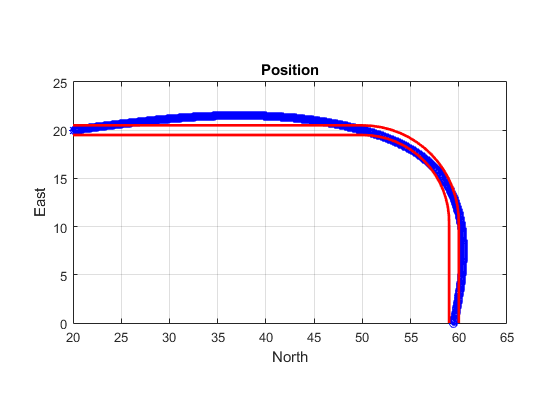
每次调用时,弹道对象输出当前位置、速度、加速度和角速度。调用轨迹在一个循环中,随着时间的推移绘制位置。缓存其他输出。
图(1)情节(tInfo.Waypoints (1, 1), tInfo.Waypoints(1、2)," b *’)标题(“位置”)轴([65 0 25])包含(“北”) ylabel (“东”网格)在Daspect([1 1 1])保持在东方= 0 (tInfo.TimeOfArrival(结束)* trajectory.SampleRate, 1,“四元数”);韦尔= 0 (tInfo.TimeOfArrival * trajectory.SampleRate(结束),3);acc =韦尔;angVel =韦尔;数= 1;而~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); / /轨迹情节(pos pos (1), (2),'博') pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1;结束

检查方向、速度、加速度和角速度随时间变化。的waypointTrajectorySystem object™通过指定的约束条件创建路径,使加速度和角速度最小化。
图(2)timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end);eulerAngles = eulerd ([tInfo.Orientation{1};东方),“ZYX股票”,“帧”);情节(timeVector eulerAngles (: 1),...timeVector eulerAngles (:, 2),...timeVector eulerAngles (:, 3));标题(的方向随时间变化)传说(绕z轴旋转的,...绕轴旋转的,...绕轴旋转的,...“位置”,“西南”)包含('时间(秒)') ylabel (的旋转(度)网格)在图(3)图(timeVector(2:结束),或者(:1),...TimeVector(2:结束),Vel(:,2),...TimeVector(2:端),Vel(:,3));标题(速度随着时间的)传说(“北”,“东”,“下来”)包含('时间(秒)') ylabel (“速度(米/秒)”网格)在图(4)情节(timeVector(2:结束)、acc (: 1),...TimeVector(2:END),ACC(:,2),...timeVector(2:结束)、acc (:, 3));标题(加速度随时间变化的)传说(“北”,“东”,“下来”,“位置”,“西南”)包含('时间(秒)') ylabel (“加速度(m / s ^ 2)”网格)在图(5)图(timeVector(2:结束),angVel (: 1),...timeVector(2:结束),angVel (:, 2),...timeVector(2:结束),angVel (:, 3));标题('角速度随着时间的推移')传说(“北”,“东”,“下来”)包含('时间(秒)') ylabel ('角速度(rad / s)'网格)在



将圆弧轨迹限制在预设范围内
你可以指定额外的路径点来创建给定范围内的轨迹。为弧形轨迹创建上界和下界。
图(1)xUpperBound =[(20:50)”,50 + 10 *罪(0:0.1:π/ 2);60 * 1(11日1)];yUpperBound =[20.5 . *的(31日1);10.5 + 10 * cos(0:0.1:π/ 2);(10:1:0)');xLowerBound =[(20:49)”;50 + 9 *罪(0:0.1:π/ 2);59 * 1(11日1)];yLowerBound =[19.5 . *的(30、1);10.5 + 9 * cos(0:0.1:π/ 2);(10:1:0)');情节(xUpperBound yUpperBound,“r”,“线宽”2);情节(xLowerBound yLowerBound,“r”,“线宽”,2)
为了在边界内创建轨迹,添加额外的路径点。创建一个新的waypointTrajectory系统对象™,然后在循环中调用它来绘制生成的轨迹。缓存方向、速度、加速度和角速度输出轨迹对象。
时间,路标,方向约束条件= [0,20,20,0,90,0,0;1.5,35,20,0,90,0,0;2.5 45,20,0,90,0,0;3、50、20、0 90 0,0;3.3,53,19.5,0,108,0,0;3.6,55.5,18.25,0,126,0,0;3.9,57.5,16,0,144,0,0;4.2,59,14,0,162,0,0;4.5,59.5,10,0180,0,0;5,59.5,5,0 180,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4),...“TimeOfArrival”约束(:1),...“定位”四元数(约束(:,前书5章7节)“eulerd”,“ZYX股票”,“帧”));tInfo = waypointInfo(轨迹);图(1)情节(tInfo.Waypoints (1, 1), tInfo.Waypoints(1、2)," b *’) count = 1;而~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); / /轨迹情节(pos pos (1), (2),“gd”) pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1;结束
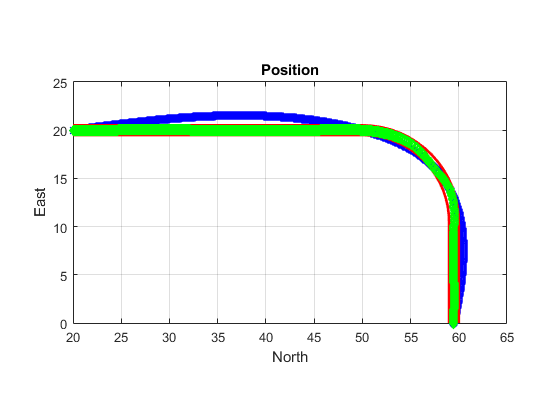
生成的轨迹现在符合指定的边界。可视化所生成轨迹的方向、速度、加速度和角速度。
图(2)timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end);eulerAngles = eulerd(东方,“ZYX股票”,“帧”);情节(timeVector(2:结束),eulerAngles (: 1),...timeVector(2:结束),eulerAngles (:, 2),...timeVector(2:结束),eulerAngles (:, 3));标题(的方向随时间变化)传说(绕z轴旋转的,...绕轴旋转的,...绕轴旋转的,...“位置”,“西南”)包含('时间(秒)') ylabel (的旋转(度)网格)在图(3)图(timeVector(2:结束),或者(:1),...TimeVector(2:结束),Vel(:,2),...TimeVector(2:端),Vel(:,3));标题(速度随着时间的)传说(“北”,“东”,“下来”)包含('时间(秒)') ylabel (“速度(米/秒)”网格)在图(4)情节(timeVector(2:结束)、acc (: 1),...TimeVector(2:END),ACC(:,2),...timeVector(2:结束)、acc (:, 3));标题(加速度随时间变化的)传说(“北”,“东”,“下来”)包含('时间(秒)') ylabel (“加速度(m / s ^ 2)”网格)在图(5)图(timeVector(2:结束),angVel (: 1),...timeVector(2:结束),angVel (:, 2),...timeVector(2:结束),angVel (:, 3));标题('角速度随着时间的推移')传说(“北”,“东”,“下来”)包含('时间(秒)') ylabel ('角速度(rad / s)'网格)在


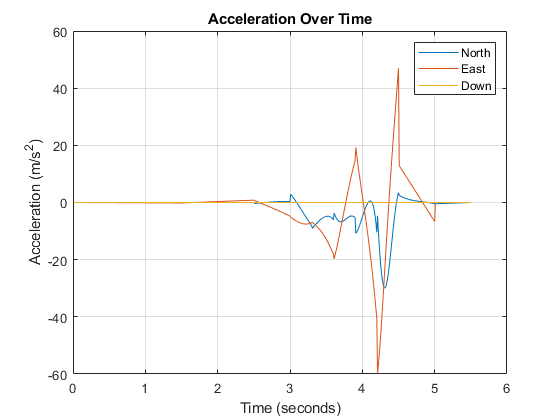

注意,虽然生成的轨迹现在符合空间边界,但轨迹的加速度和角速度有些不稳定。这是由于过度指定路径点。
算法
的waypointTrajectory系统对象定义了平滑地通过路径点的轨迹。该轨迹通过插值来连接路径点,该插值假定在轨迹参考系中表示的重力方向是恒定的。一般来说,你可以用waypointTrajectory模型平台或车辆的轨迹在数百公里的跨度。
轨迹的平面路径()x-y平面投影由分段,梭形曲线组成。两个连续航点之间的曲线的曲率随它们之间的曲线长度而变化。选择每个航点处的路径的切线方向以最小化曲率中的不连续性,除非课程通过明确指定课程属性或隐式地通过速度财产。一旦路径建立,该对象使用三次埃尔米特插值来计算车辆的位置在整个路径作为时间和平面距离的函数。
正常组件(z-分量)的轨迹,以满足形状保持分段样条(PCHIP),除非爬升率明确地通过爬属性的第三列速度财产。根据所选的爬升速率选择符号ReferenceFrame:
当选择“ENU”参考系时,指定正爬升率将导致的值增加z.
当选择“NED”参考系时,指定一个正爬升率将导致的值减小z.
你可以通过两种主要的方式来定义车辆通过路径的方向:
如果
取向属性,则对象使用分段三次、四元数样条来计算沿路径的方向作为时间的函数。如果
取向未指定属性,然后车辆的偏航总是与路径对齐。卷和间距然后由AutoBank和AutoPitch分别为属性值。AutoBankAutoPitch描述 假假飞行器总是水平的(零俯仰和滚转)。这通常用于大型船舶。 假真正的车辆俯仰与路径对齐,其横摇始终为零。这通常用于地面车辆。 真正的假车辆的俯仰和横摇的选择,使其本地化z-轴与净加速度(包括重力)对齐。这通常用于旋翼飞行器。 真正的真正的选择车辆横摇,使其局部横平面对准净加速度(包括重力)。车辆俯仰与路径对齐。这通常用于两轮车辆和固定翼飞机。
扩展功能
另请参阅
你也可以从以下列表中选择一个网站: