rotz
旋转矩阵用于绕z轴旋转
描述
例子
输入参数
输出参数
更多关于
旋转矩阵
旋转矩阵用于将载体旋转成新方向。
在转换三维空间中的矢量方面,通常遇到旋转矩阵。旋转矩阵用于两个感官:它们可用于将向量旋转到新位置,或者它们可用于将坐标基础(或坐标系)旋转到新的位置。在这种情况下,载体单独留下,但其组件在新的基础上将与原始基础的组成部分不同。在欧几里德空间中,有三个基本旋转:围绕x,y和z轴均匀。每个旋转由旋转角度指定。当通过沿旋转轴线朝向原点观察时观察时,旋转角度被定义为正逆时针逆时针。任何任意旋转都可以由这三个的组合组成(欧拉轮定理)。例如,您可以使用三个旋转序列在任何方向上旋转向量: 。
旋转x,y和z轴围绕X,Y和Z轴旋转矢量的旋转矩阵:
逆时针旋转X轴
绕y轴逆时针旋转
绕z轴逆时针旋转
以下三个数字显示每个旋转轴的正旋转是什么样的:



对于任何旋转,有一个逆旋转令人满意 。例如,通过改变角度的符号来获得X轴旋转矩阵的倒数:
这个例子说明了一个基本的性质:旋转逆矩阵是原始矩阵的转置。旋转矩阵满足A'a = 1, 因此DET(a)= 1。在旋转下,保留向量长度以及矢量之间的角度。
我们可以用另一种方式来考虑旋转。考虑原始的基向量集合, ,并使用旋转矩阵将它们全部旋转一种。这就产生了一组新的基向量 与原件有关:
使用转置,您可以将新的基础向量写入旧基向量的线性组合:
现在,任何向量都可以写成任何一个基础向量的线性组合:
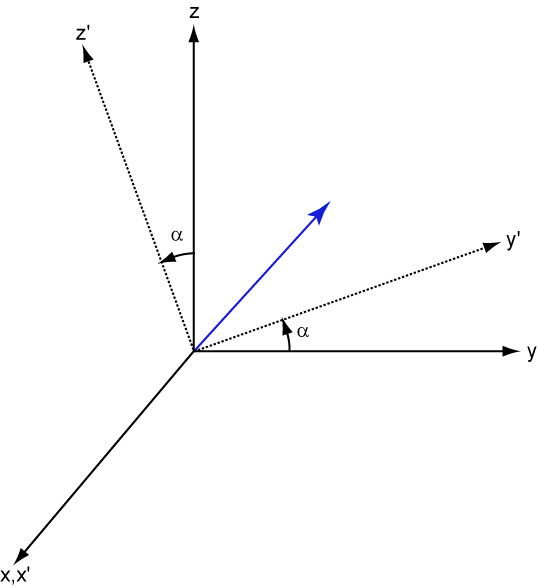
使用代数操作,您可以在基础(或坐标系)旋转时导出固定向量的组件的转换。该转换使用旋转矩阵的转置。
下图示出了如何在坐标系围绕x轴旋转时转换向量。该图显示了如何将该转换解释为旋转矢量在相反的方向。

参考文献
[1] Goldstein,H.,C.Poole和J. Safko,经典力学,第3版,旧金山:Addison Wesley, 2002,第142-144页。
扩展能力
你也可以从以下列表中选择一个网站: