主要内容
Rlpredefinedenv.
创建预定义的钢筋学习环境
描述
例子
基本网格世界强化学习环境
使用预定义'BasicGridworld'关键词创建基本网格世界强化学习环境。
Env = Rlpredefinedenv('BasicGridworld')
env = rlmdpenv具有属性:型号:[1x1 rl.env.gridworld] resetfcn:[]
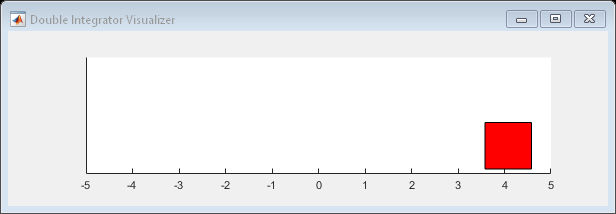
连续双积极加固学习环境
使用预定义'双凝胶组连续'关键词创建连续双积分增强学习环境。
Env = Rlpredefinedenv('双凝胶组连续')
Env =双凝胶组连续性与属性:增益:1 ts:0.1000 maxdistance:5守队列:0.0100 q:[2x2 double] r:0.0100 maxiforce:inf状态:[2x1 double]
您可以使用该环境可视化环境阴谋使用它与它交互重启和步职能。
绘图(ENV)观察=重置(ENV)
观察=2×14 0.
[观察,奖励,isdone] =步骤(env,16)
观察=2×14.0800 1.6000.
奖励= -16.5559.
Isdone =逻辑0.
创建连续的简单摆模型环境
使用预定义'SimpleDepulummodel连续'关键字创建连续简单摆模型加固学习环境。
Env = Rlpredefinedenv('SimpleDepulummodel连续')
Env = 万博1manbetxSimulinkenvwithAgent with属性:型号:rlsimplepentulummodel agentblock:rlsimpleveptulummodel / rl代理resetfcn:[] UseFastrest:ON
输入参数
输出参数
在R2019A介绍
您还可以从以下列表中选择一个网站: