自行车运动
自行车车辆型号
描述
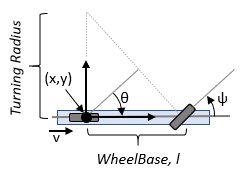
自行车运动创建一个自行车车辆模型来模拟简化的类似汽车的车辆动力学。该模型代表一个车辆,两个车轴被距离隔开,轴距。这state of the vehicle is defined as a three-element vector, [XyTheta],具有全球xy- 位置,以米为单位,并为车辆标题角度指定,Theta,用弧度指定。前轮可以用转向角转动psi。车辆标题,Theta, is defined at the center of the rear axle. To compute the time derivative states of the model, use the衍生物具有输入命令和当前机器人状态的功能。
创建
描述
KinematicModel= bicycleKinematics
KinematicModel= Bicyclekimatics(名称,值)
特性
对象功能
衍生物 |
车辆状态的时间派生 |
例子
自行车运动机器人的情节路径

References
[1] Lynch,Kevin M.和Frank C. Park。现代机器人技术:力学,计划和控制1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I.机器人技术,视觉和控制:MATLAB中的基本算法。施普林格,2011年。
扩展功能
也可以看看
课程
块
功能
在R2019b中引入
You can also select a web site from the following list:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)