显示
展示机器人模型图
描述
例子
用视觉几何图形显示机器人模型
你可以导入具有.stl文件与统一机器人描述格式(URDF)文件相关联,用于描述机器人的视觉几何形状。每个刚体都有一个特定的视觉几何。的importrobot函数解析URDF文件以获得机器人模型和可视化几何图形。该函数假定机器人的视觉几何和碰撞几何是相同的,并将视觉几何赋值为相应物体的碰撞几何。
使用显示函数以图形的形式显示机器人模型的视觉和碰撞几何图形。然后,您可以通过单击组件来检查它们,并右键单击以切换可见性来与模型进行交互。
将机器人模型作为URDF文件导入。的.stl文件位置必须在这个URDF中正确指定。添加其他.stl文件到单个刚体,看addVisual.
机器人= importrobot (“iiwa14.urdf”);
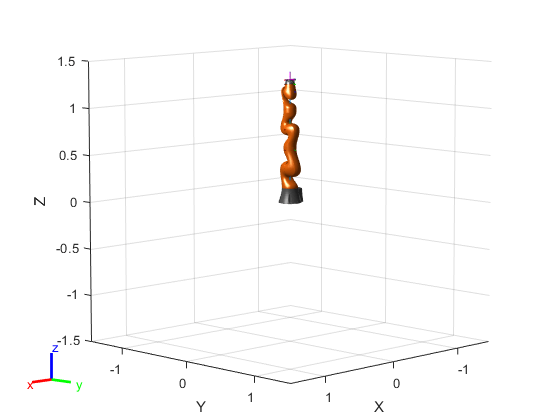
用相关的视觉模型可视化机器人。点击身体或框架来检查它们。右击物体以切换每个可视几何体的可见性。
表演(机器人,“视觉效果”,“上”,“碰撞”,“关闭”);
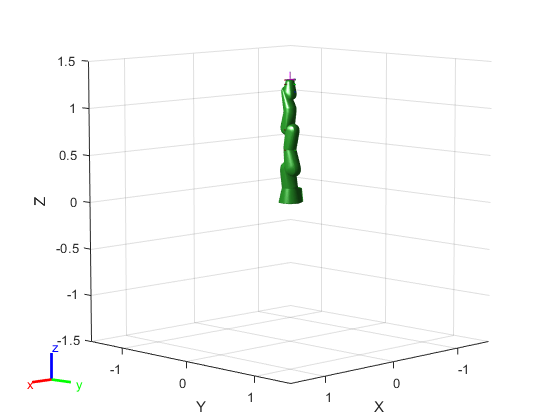
可视化机器人与相关的碰撞几何图形。点击身体或框架来检查它们。右键单击物体以切换每个碰撞几何图形的可见性。
表演(机器人,“视觉效果”,“关闭”,“碰撞”,“上”);
想象机器人配置
控件创建的机器人的不同配置RigidBodyTree模型。使用homeConfiguration或randomConfiguation函数来生成定义所有关节位置的结构。
将示例机器人加载为RigidBodyTree对象。
负载exampleRobots.mat
为Puma机器人的家庭配置创建一个结构。该结构具有机器人模型上每个身体的关节名称和位置。
配置= homeConfiguration (puma1)
配置=1×6带有字段的结构数组:JointName JointPosition
显示home配置使用显示.您不需要指定配置输入。
显示(puma1);

修改配置,将第二个关节位置设置为π/ 2.显示由此产生的机器人配置变化。
配置(2)。JointPosition =π/ 2;显示(puma1配置);
创建随机配置并显示它们。
显示(puma1 randomConfiguration (puma1));

利用Denavit-Hartenberg参数构建机械手
使用Puma560®机器人的Denavit-Hartenberg (DH)参数来构建机器人。每个刚体每次添加一个,由关节对象指定子到父的转换。
DH参数定义了机器人的几何形状与每个刚体如何连接到它的父体有关。为方便起见,在矩阵中设置Puma560机器人的参数[1].Puma机器人是一种链式机械手。DH参数相对于矩阵中的前一行,对应于前一个关节连接。
Dhparams = [0 pi/2 0 0;0.4318 00 0 0.0203 -pi/2 0.15005 0;0 pi/2 0.4318 0;0 -pi/2 0 0;0 0 0 0];
创建一个刚体树对象来构建机器人。
机器人= rigidBodyTree;
创建第一个刚体并将其添加到机器人上。添加刚体:
创建一个
rigidBody对象,并给它一个唯一的名称。创建一个
rigidBodyJoint对象,并给它一个唯一的名称。使用
setFixedTransform使用DH参数指定体对体转换。DH参数的最后一个元素,θ,因为角度取决于关节位置。调用
addBody将身体的第一个关节连接到机器人的基本框架上。
body1 = rigidBody (“界面”);jnt1 = rigidBodyJoint (“jnt1”,“转动”);setFixedTransform (jnt1 dhparams (1:)“dh”);界面。联合= jnt1;addBody(机器人,界面,“基地”)
创建和添加其他刚体到机器人。在调用时指定前面的主体名称addBody把它。每个固定变换都是相对于之前的关节坐标系的。
body2 = rigidBody (“body2”);jnt2 = rigidBodyJoint (“jnt2”,“转动”);body3 = rigidBody (“body3”);jnt3 = rigidBodyJoint (“jnt3”,“转动”);body4 = rigidBody (“body4”);jnt4 = rigidBodyJoint (“jnt4”,“转动”);body5 = rigidBody (“body5”);jnt5 = rigidBodyJoint (“jnt5”,“转动”);body6 = rigidBody (“body6”);jnt6 = rigidBodyJoint (“jnt6”,“转动”);: setFixedTransform (jnt2 dhparams (2),“dh”);: setFixedTransform (jnt3 dhparams (3),“dh”);: setFixedTransform (jnt4 dhparams (4),“dh”);: setFixedTransform (jnt5 dhparams (5),“dh”);: setFixedTransform (jnt6 dhparams (6),“dh”);body2。联合= jnt2;body3。联合= jnt3;body4。联合= jnt4;body5。联合= jnt5;body6。Joint = jnt6; addBody(robot,body2,“界面”) addBody (body3的机器人“body2”) addBody (body4的机器人“body3”) addBody (body5的机器人“body4”) addBody (body6的机器人“body5”)
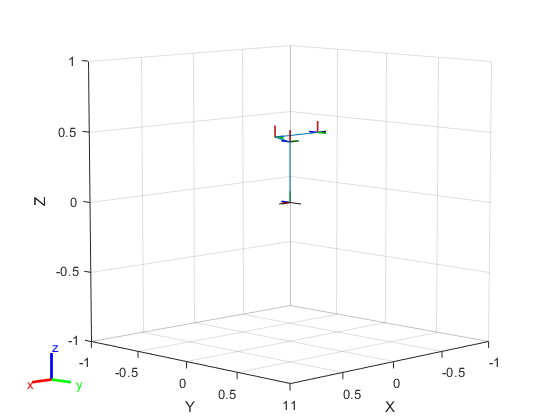
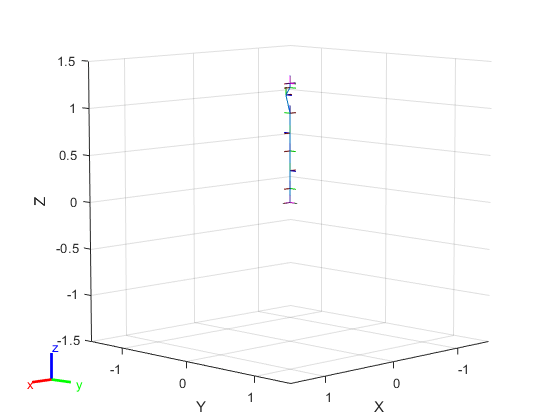
通过使用showdetails或显示函数。showdetails列出MATLAB®命令窗口中的所有主体。显示用给定的配置显示机器人(默认为home)。调用轴修改轴限制并隐藏轴标签。
showdetails(机器人)
-------------------- 机器人:(6)尸体Idx身体名称联合名称联合类型父母名字(Idx)孩子的名字(s ) --- --------- ---------- ---------- ---------------- ---------------- 1 body1 jnt1转动基地(0)body2 (2) 2 body2 jnt2转动界面(1)body3 (3) 3 body3 jnt3转动body2 (2) body4 (4) 4 body4 jnt4转动body3 (3) body5 (5) 5 body5 jnt5转动body4 (4) body6 (6)6 body6 jnt6转动body5 (5 ) --------------------
显示(机器人);轴([-0.5,0.5,-0.5,0.5,-0.5,0.5])轴从
P. I. Corke和B. Armstrong-Helouvry。“PUMA 560机器人模型参数间的一致性搜索”。1994年IEEE国际机器人和自动化会议论文集, IEEE第一版。Soc。出版社,1994,第1608-13页。DOI.org (Crossref), doi: 10.1109 / ROBOT.1994.351360。
为机械臂添加碰撞网格和碰撞检查
加载一个机器人模型并修改碰撞网格。清除现有的碰撞网格,添加简单的碰撞对象原语,并检查某些配置是否在碰撞中。
负载机器人模型
控件将预先配置好的机器人模型加载到工作区中loadrobot函数。这个模型已经为每个物体指定了碰撞网格。迭代所有刚体元素并清除现有的碰撞网格。确认现有的网格已经消失。
机器人= loadrobot (“kukaIiwa7”,“DataFormat”,“列”);为i = 1:机器人。NumBodiesclearCollision(robot.Bodies{i})结束表演(机器人,“碰撞”,“上”,“视觉效果”,“关闭”);
添加碰撞气缸
迭代地为每个物体添加一个碰撞圆柱体。对于这个特定的模型,跳过一些物体,因为它们重叠并且总是与末端执行器(物体10)相撞。
collisionObj = collisionCylinder (0.05, 0.25);为i = 1:机器人。NumBodies如果我在6 &&我< 10跳过这些尸体。其他的我addCollision (robot.Bodies {}, collisionObj)结束结束表演(机器人,“碰撞”,“上”,“视觉效果”,“关闭”);

检查碰撞
生成一系列随机配置。检查机器人在每个配置处是否处于碰撞状态。可视化每个有冲突的配置。
图rng (0)%为保证重复性,设置随机种子。为i = 1:20 config = randomConfiguration(机器人);isColliding = checkCollision(机器人、配置);如果isColliding显示(机器人,配置,“碰撞”,“上”,“视觉效果”,“关闭”);标题(碰撞检测的)其他的%跳过non-collisions。结束结束

输入参数
输出参数
提示
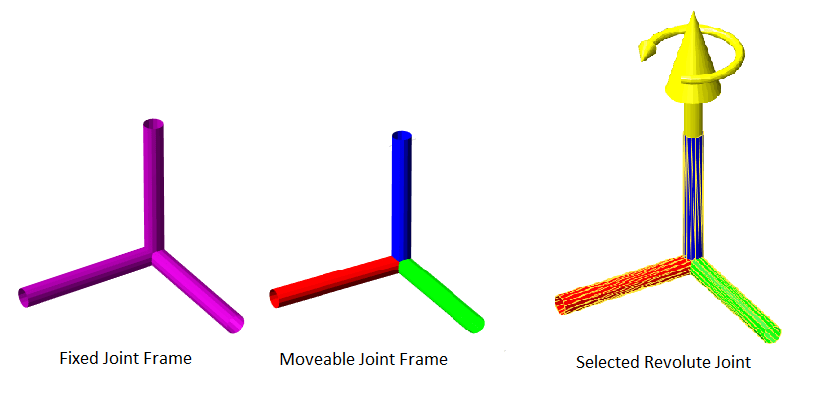
机器人模型有与之相关的可视化组件。每一个rigidBody对象包含显示为主体框架的坐标框架。每个身体也可以有与他们相关的视觉网格。默认情况下,这两个组件都是自动显示的。您可以检查或修改刚体树显示的可视化组件。单击身体框架或视觉网格以黄色突出显示它们,并查看相关的身体名称、索引和关节类型。右键单击以切换单个组件的可见性。
体框架:单独的身体框架显示为三轴坐标系。固定帧是粉色帧。活动关节类型显示为RGB轴。你可以点击一个身体框架来看到运动轴。移动关节在运动轴方向上显示一个黄色箭头,转动关节在旋转轴方向上显示一个圆形箭头。
视觉网格:使用
addVisual或者通过使用importrobot用。导入一个机器人模型.stl指定的文件。通过右键单击图形中的各个实体,您可以关闭它们的网格或指定视觉效果名称-值对隐藏所有可视几何图形。


你也可以从以下列表中选择一个网站: