机械手算法设计
刚体树模型,逆运动学,动力学,轨迹
这些Robotics System Toolbox™机械手算法支持与铰接、串行链接机器人相关的工作流。万博1manbetx使用a定义机器人模型rigidBodyTree由刚体组成的物体,作为连接和运动的结构单元和关节。该机器人表示包含运动学约束和动力学特性。使用关节和任务空间运动模型获得给定输入命令的机器人运动。
如果您将机器人描述作为URDF文件或Simscape™多体™模型,您可以使用importrobot。
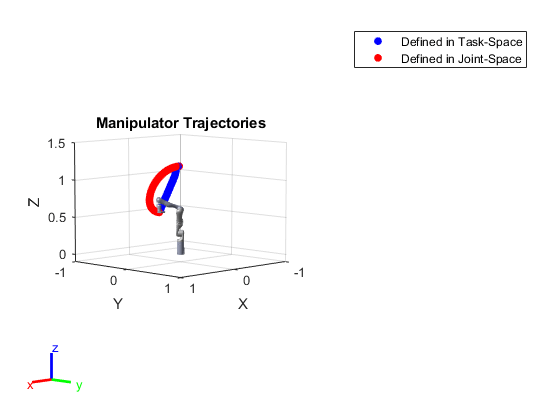
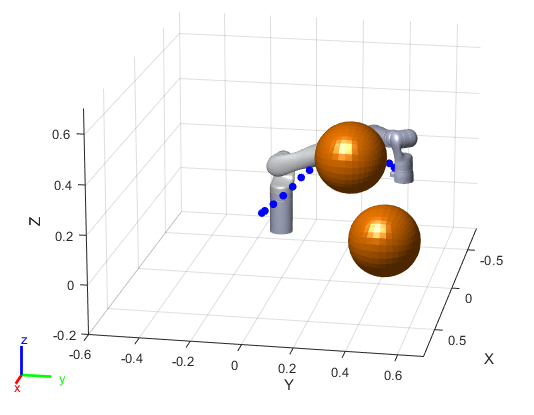
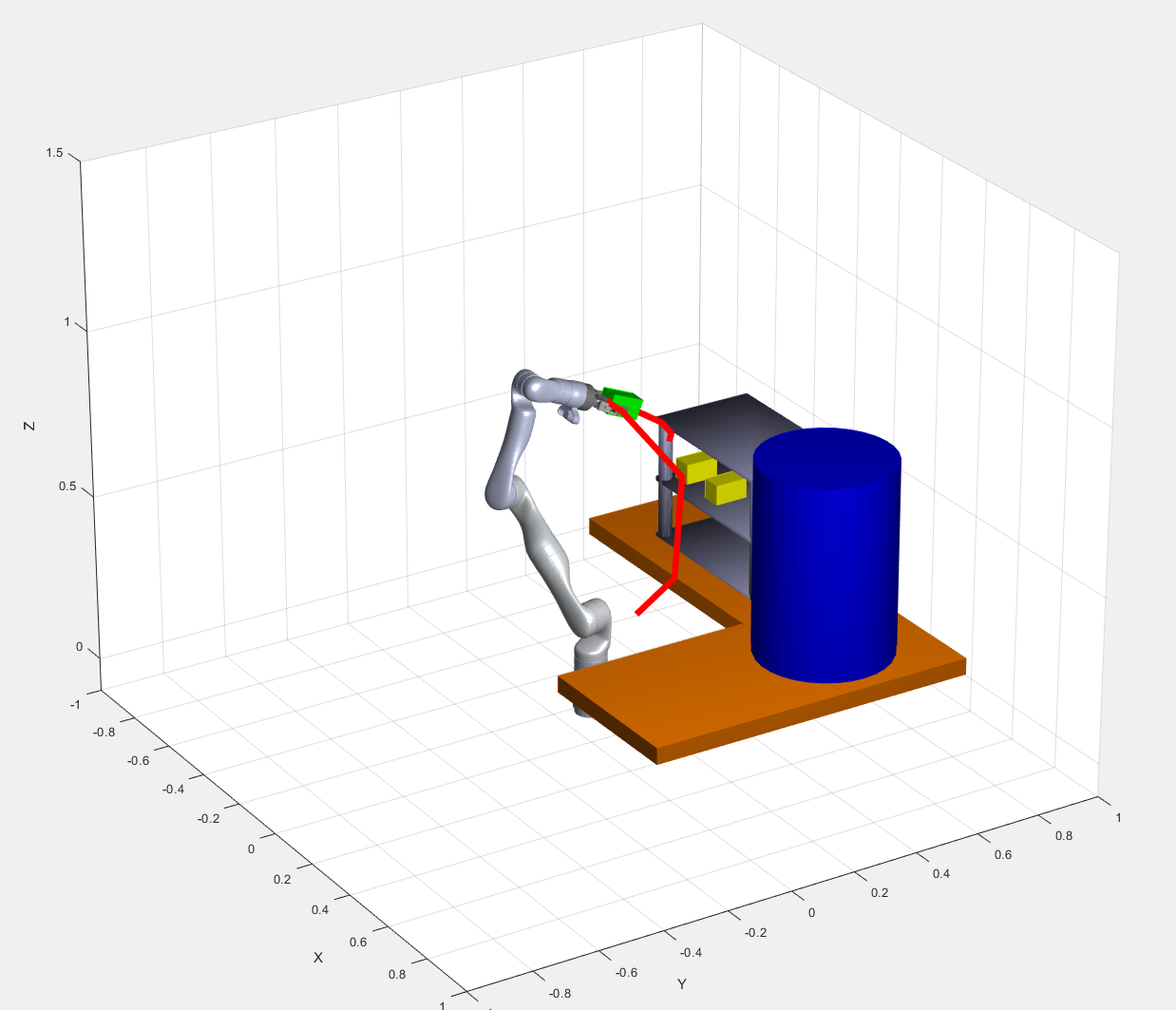
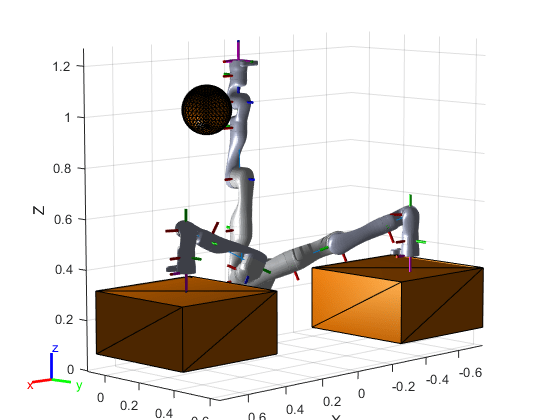
根据末端执行器的位置执行逆运动学以获得关节构型。应用额外的外部约束,比如将摄像机对准工作空间。为规划和执行规划的路径生成平滑的轨迹。检测碰撞或计算间隙,以避免碰撞,而执行路径。