Inverse Kinematics
Inverse kinematics (IK) determines joint configurations of a robot model to achieve a desired end-effect position. Robot kinematic constraints are specified in therigidBodyTreerobot model based on the transformation between joints. You can also specify external constraints, like an aiming constraint for a camera arm or a Cartesian bounding box on a certain rigid body link. Specify parameters for these constraints with theRobot Constraintsobjects and pass them to ageneralizedInverseKinematicsobject.
Apps
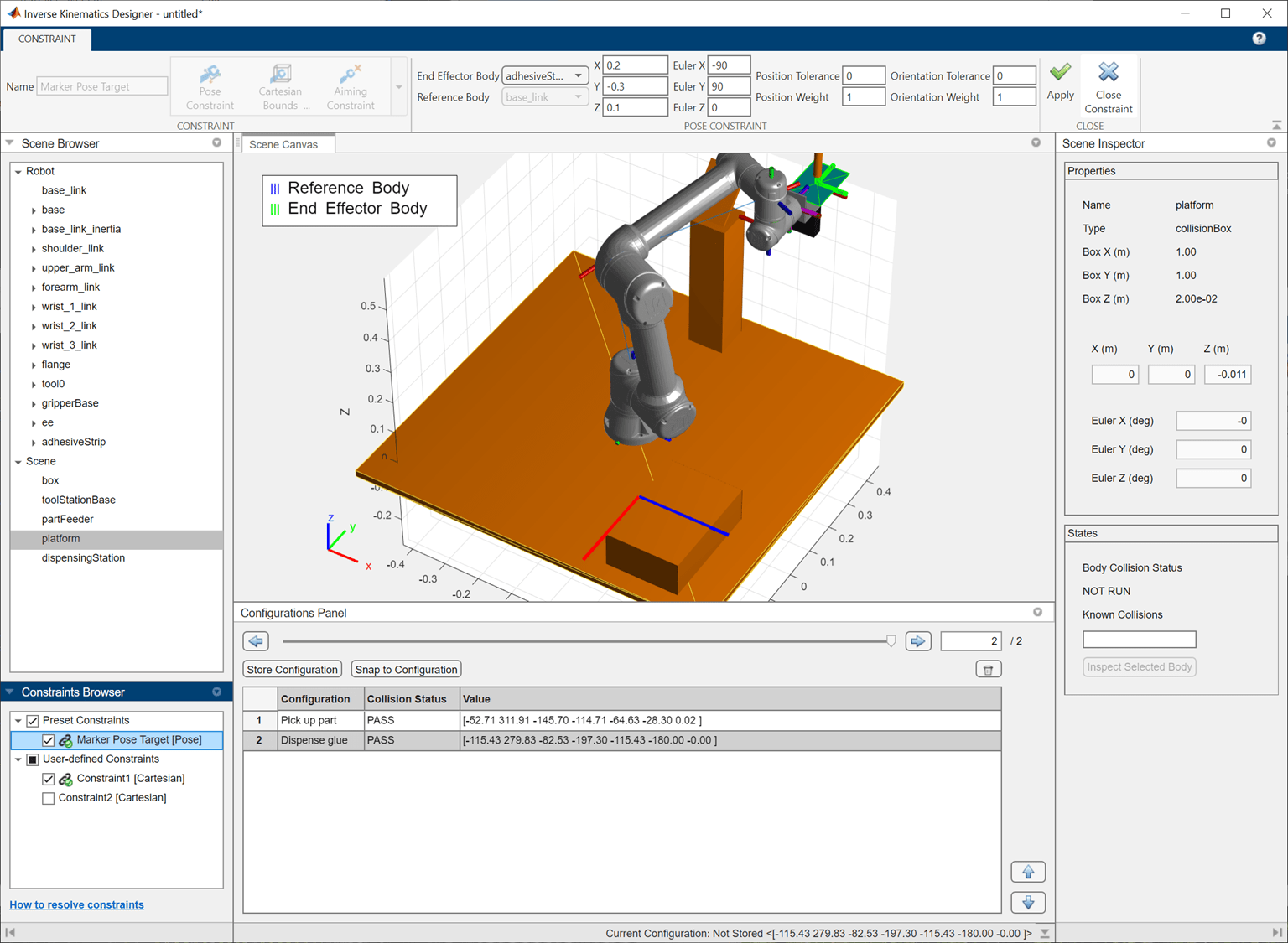
| Inverse Kinematics Designer | Design inverse kinematics solvers, configurations, and waypoints |
Functions
Blocks
| Inverse Kinematics | Compute joint configurations to achieve an end-effector pose |
Topics
- Inverse Kinematics Algorithms
Description of inverse kinematics solver algorithms and solver parameters
- 2-D Path Tracing with Inverse Kinematics
Calculate inverse kinematics for a simple 2-D manipulator.
- Solve Inverse Kinematics for Closed Loop Linkages
Closed loop linkages are widely used in automobiles, construction and manufacturing machines, and in robot manipulation.
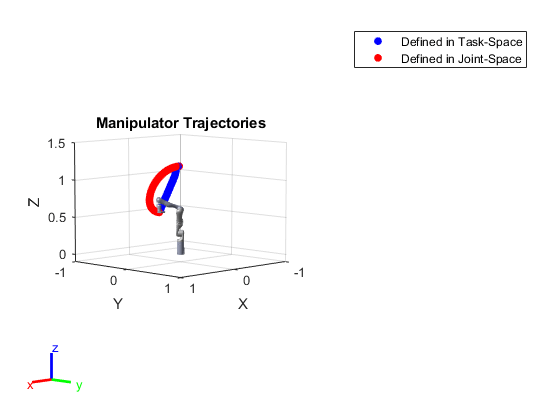
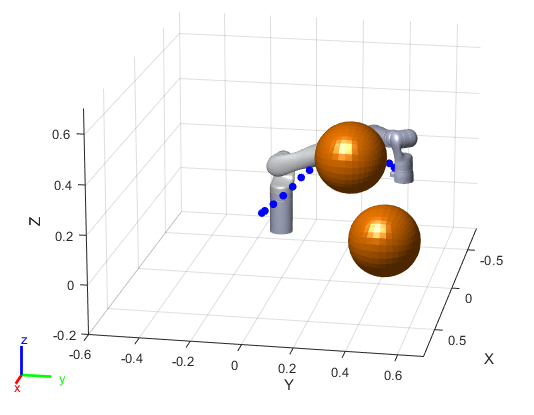
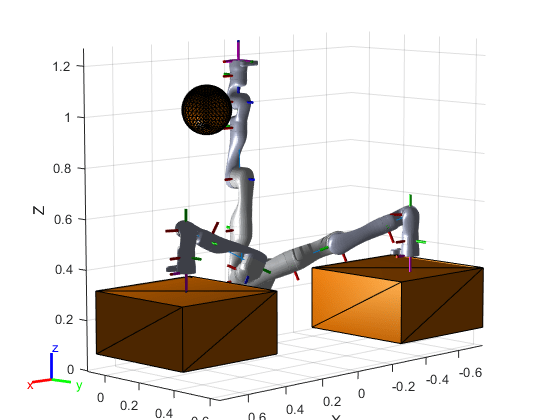
- Plan a Reaching Trajectory With Multiple Kinematic Constraints
This example shows how to use generalized inverse kinematics to plan a joint-space trajectory for a robotic manipulator.
- Position Delta Robot Using Generalized Inverse Kinematics
Model a delta robot using the a
rigidBodyTreerobot model.
Featured Examples

You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)