主要内容
机器人模型
刚体树模型,正向运动学,动力学,朝向关节和任务空间运动模型
机器人模型模拟了机械臂机器人和其他刚体系统的运动学和动力学特性。这些模型rigidBodyTree含对象rigidBody和rigidBodyJoint具有关节变换和惯性特性的元素。
使用。访问特定商业机器人的预定义模型,如KINOVA™和KUKA™loadrobot函数。
导入现有的UDRF或的Simscape™多体™模型使用importrobot.
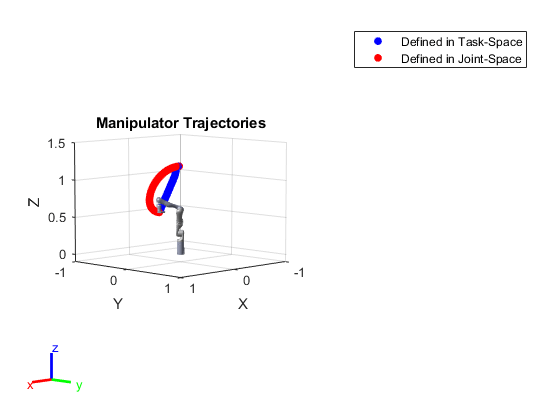
使用关节或任务空间的运动模型为机器人的运动建模jointSpaceMotionModel和taskSpaceMotionModel对象。
功能
块
主题
运动学
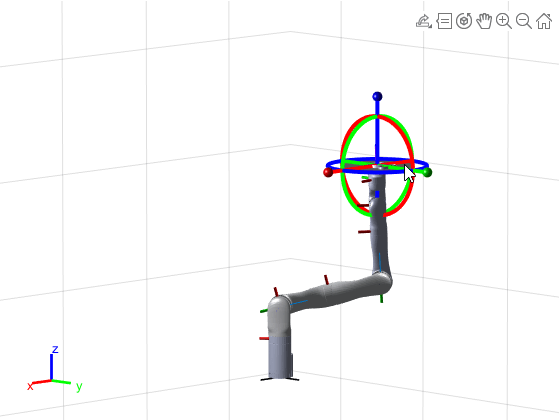
探讨了刚体树机器人模型的结构和具体部件。
这个示例一步步地介绍了构建机器人的过程,向您展示了不同的机器人组件以及如何调用函数来构建它。
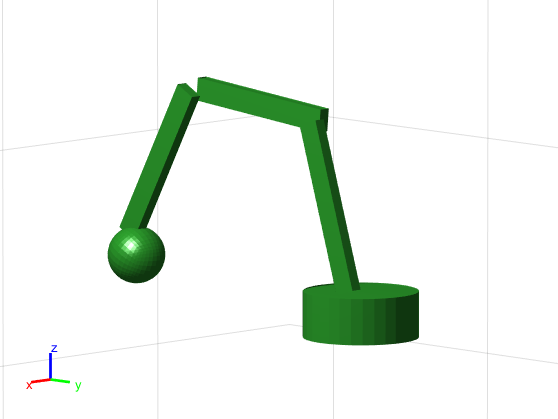
利用Puma560®机械臂机器人的Denavit-Hartenberg (DH)参数,增量地建立刚体树机器人模型。
动力学
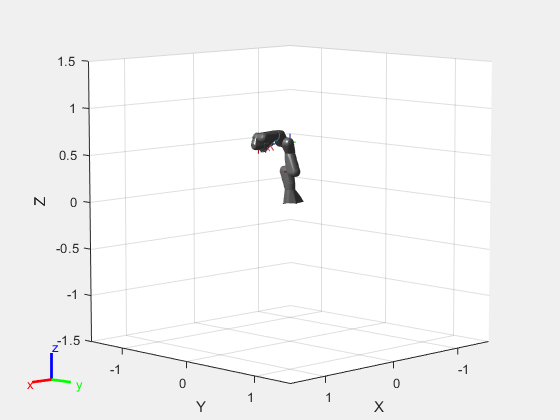
本主题详细介绍了刚体机器人动力学的不同元素、特性和方程。机器人动力学是作用在机器人上的力与机器人最终的运动之间的关系。
产生力矩来平衡作用在平面机器人末端执行器上的端点力。
模拟
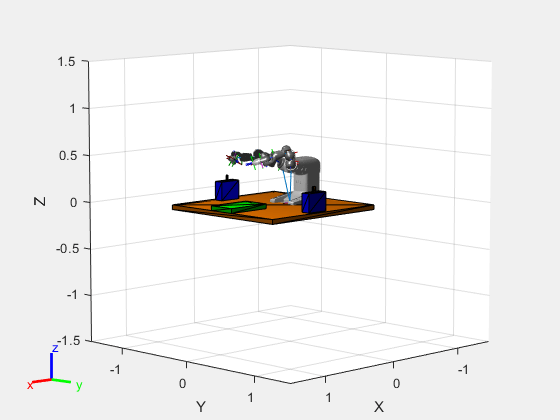
配置凉亭和Simulink的机械手机器人的万博1manbetx联合仿真
建立一个UR10机器人模型进行凉亭和Simulink™之间的协同仿真。万博1manbetx
在Simulink和Gazebo中的联合仿真控制机械手万博1manbetx
利用Simulink与Gazebo的联合仿真对机器人的控制进行仿真。万博1manbetx
特色的例子
您还可以从以下列表中选择一个网站: