jointSpaceMotionModel
模型刚体树运动给定关节空间输入
描述
该jointSpaceMotionModel对象模型的操纵机器人的闭环关节空间运动,指定为rigidBodyTree宾语。运动模型的行为由定义移动型属性。
创建
句法
描述
motionModel= jointSpaceMotionModel
motionModel= jointSpaceMotionModel( “RigidBodyTree”,树)rigidBodyTree宾语。
motionModel= jointSpaceMotionControlModel(名称,值)
属性
对象函数
衍生物 |
机械手模型状态的时间导数 |
updateErrorDynamicsFromStep |
更新值NaturalFrequency和阻尼比特性给定的期望的阶跃响应 |
例子
创建关节间隙运动模型
这个例子显示了如何创建和使用jointSpaceMotionModel对象在关节空间中的机械手的机器人。
创建机器人
机器人= loadrobot(“kinovaGen3”,“DATAFORMAT”,“柱”,“重力”,[0 0 -9.81]);
设置仿真
设定时间跨度为1个s的0.01秒的时间步长大小。设置初始状态是机器人,家用配置为零的速度。
TSPAN = 0:0.01:1;初始化状态= [homeConfiguration(机器人);零(7,1)];
与目标位置,零速度和零加速度定义基准状态。
targetState =π/ 4;PI / 3;PI / 2;-pi / 3;PI / 4;-pi / 4;3 * pi / 4的;零(7,1);零(7,1)];
创建运动模型
模型用5%的过冲适度快速阶跃响应定义计算的转矩控制和动态误差的系统。
motionModel = jointSpaceMotionModel(“RigidBodyTree”,机器人);updateErrorDynamicsFromStep(motionModel,0.3,0.05);
模拟机器人
使用该模型的导数函数作为输入到ODE45解算器,以模拟在1秒的行为。
[T,robotState] = ODE45(@(T,状态)衍生物(motionModel,州,targetState),TSPAN,初始化状态);
绘制响应
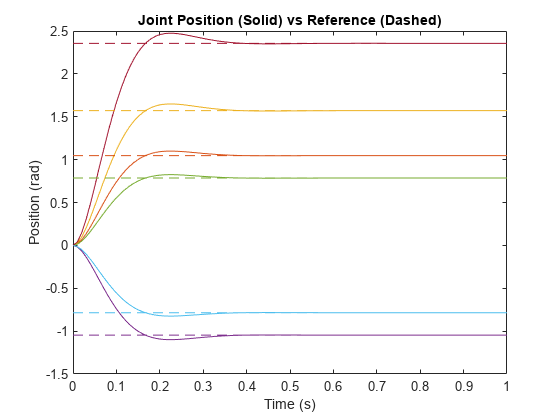
画出所有的关节驱动其目标状态的位置。接头与起始位置和目标位置致动到所述目标以更快的速率比具有较低的位移之间的较高的位移。这导致超调,但所有的关节都具有相同的稳定时间。
图图(吨,robotState(:,1:motionModel.NumJoints));保持所有;情节(T,targetState(1:motionModel.NumJoints)*一(1,长度(T)),“ - ”);标题(“联合位置(实)与参考(虚线)”);xlabel(“时间(s)”)ylabel(“位置(弧度)”);
参考
[1]克雷格,约翰J.介绍机器人:力学与控制。上马鞍河,新泽西州:培生教育出版,2005。
[2]司朋,马克W.,赛斯哈钦森和马库马利·维德亚萨加。机器人建模与控制。新泽西州霍博肯市:Wiley出版社,2006年。
扩展功能
也可以看看
类
块
功能
介绍了在R2019b
您还可以选择从下面的列表中的网站: