updateErrorDynamicsFromStep
Update values ofNaturalFrequencyandDampingRatioproperties given desired step response
Syntax
Description
updateErrorDynamicsFromStep(updates the values of themotionModel,settlingTime,overshoot)NaturalFrequencyandDampingRatioproperties of the givenjointSpaceMotionModelobject given the desired step response.
updateErrorDynamicsFromStep(updates themotionModel,settlingTime,overshoot,jointIndex)NaturalFrequencyandDampingRatioproperties for a specific joint. In this case, the values ofSettlingTimeandOvershootmust be provided as scalars because they apply to a single joint.
Examples
创建中nt-Space Motion Model
This example shows how to create and use ajointSpaceMotionModelobject for a manipulator robot in joint-space.
Create the Robot
机器人= loadrobot ("kinovaGen3","DataFormat","column","Gravity",[0 0 -9.81]);
Set Up the Simulation
Set the timespan to be 1 s with a timestep size of 0.01 s. Set the initial state to be the robots, home configuration with a velocity of zero.
tspan = 0:0.01:1; initialState = [homeConfiguration(robot); zeros(7,1)];
Define the a reference state with a target position, zero velocity, and zero acceleration.
targetState = [pi/4; pi/3; pi/2; -pi/3; pi/4; -pi/4; 3*pi/4; zeros(7,1); zeros(7,1)];
Create the Motion Model
模型系统和计算转矩控制error dynamics defined by a moderately fast step response with 5% overshoot.
motionModel = jointSpaceMotionModel("RigidBodyTree",robot); updateErrorDynamicsFromStep(motionModel,.3,.05);
Simulate the Robot
Use the derivative function of the model as the input to theode45solver to simulate the behavior over 1 second.
[t,robotState] = ode45(@(t,state)derivative(motionModel,state,targetState),tspan,initialState);
Plot the Response
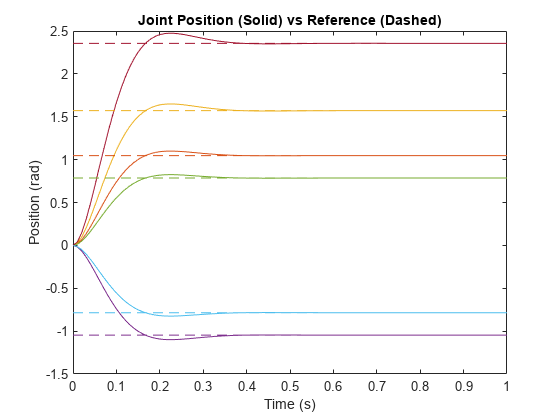
Plot the positions of all the joints actuating to their target state. Joints with a higher displacement between the starting position and the target position actuate to the target at a faster rate than those with a lower displacement. This leads to an overshoot, but all of the joints have the same settling time.
figure plot(t,robotState(:,1:motionModel.NumJoints)); holdall; plot(t,targetState(1:motionModel.NumJoints)*ones(1,length(t)),"--"); title("Joint Position (Solid) vs Reference (Dashed)"); xlabel("Time (s)") ylabel("Position (rad)");
Input Arguments
References
[1] Ogata, Katsuhiko.Modern Control Engineering4th ed. Englewood Cliffs, NJ: Prentice-Hall, 2002.
Extended Capabilities
Version History
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)