主要内容
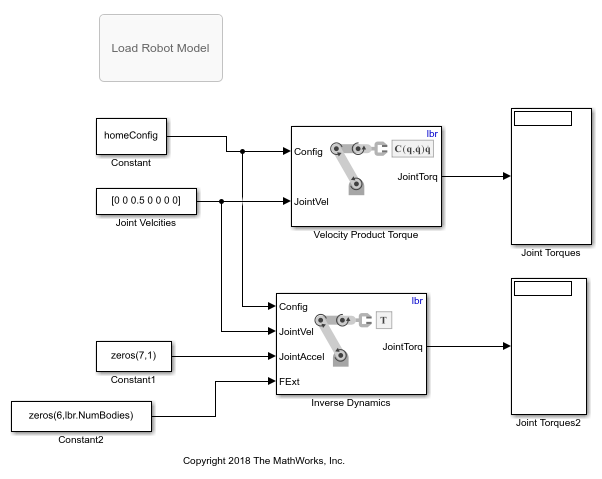
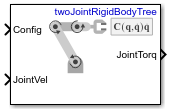
速度的产品转矩
抵消速度引起的力的关节力矩
- 库:
机器人系统工具箱/机械手算法
描述
的速度的产品转矩块返回的力矩抵消了给定机器人配置(关节位置)的速度诱导的力和关节速度刚体的树机器人模型。
港口
输入
输出
参数
扩展功能
另请参阅
块
类
功能
介绍了R2018a
你也可以从以下列表中选择一个网站:
抵消速度引起的力的关节力矩
机器人系统工具箱/机械手算法
的速度的产品转矩块返回的力矩抵消了给定机器人配置(关节位置)的速度诱导的力和关节速度刚体的树机器人模型。
你也可以从以下列表中选择一个网站: