帮助中心帮助中心
关节力矩补偿重力
机器人系统工具箱/机械手算法
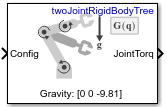
的重力力矩块返回关节力矩必须持有与当前的机器人在给定配置重力设置在刚体的树机器人模型。
全部展开
配置
机器人配置,指定为一个向量所有nonfixed关节位置的机器人模型,设定的刚体的树参数。你也可以为一个复杂的机器人使用生成这个向量homeConfiguration或randomConfiguration函数在一个常数或MATLAB函数块。
homeConfiguration
randomConfiguration
JointTorq
关节力矩,指定为一个向量。每个元素对应于一个扭矩应用到一个特定的关节。关节力矩的数量等于自由度(nonfixed关节)的机器人。
刚体的树
twoJointRigidBodyTree
RigidBodyTree
机器人模型,指定为一个rigidBodyTree对象。你还可以导入一个机器人模型从一个URDF(统一描述机器人形成)文件使用importrobot。
rigidBodyTree
importrobot
默认的机器人模型,twoJointRigidBodyTree是一个机器人转动关节和两个自由度。
模拟使用
解释执行
代码生成
解释执行——使用MATLAB模拟模型®翻译。这个选项可以缩短启动时间,但较慢的仿真速度比代码生成。在这种模式下,你可以调试的源代码。
代码生成使用生成的C代码,模拟模型。第一次运行模拟,仿真软件万博1manbetx®生成C代码块。为后续模拟C代码重用,只要不改变模型。这个选项需要额外的启动时间,但是随后的模拟的速度相当解释执行。
可调:没有
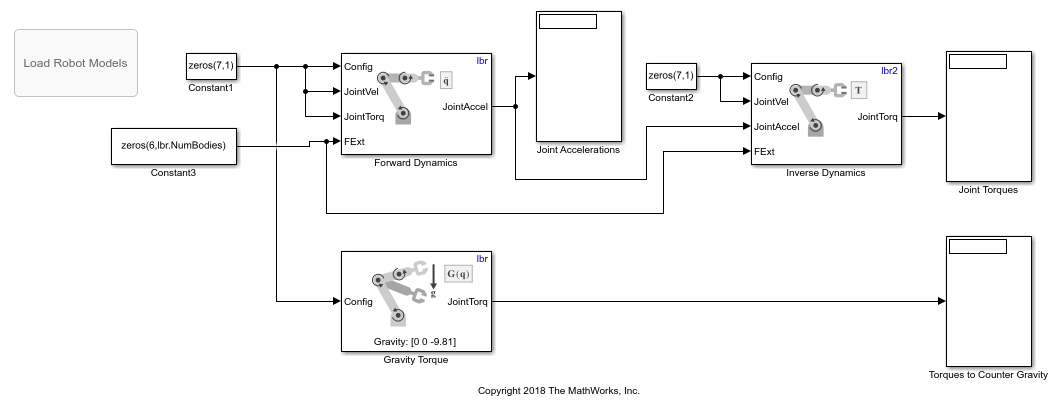
使用机械手算法块计算和比较机械手机器人动力学重力。
介绍了R2018a
gravityTorque
你点击一个链接对应MATLAB命令:
运行该命令通过输入MATLAB命令窗口。Web浏览器不支持MATLAB命令。万博1manbetx
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室