天线系统鲁棒性分析
您可以创建和分析由不确定状态空间矩阵组成的不确定状态空间模型。在这个例子中,创建一个具有参数不确定性的MIMO系统,并分析它的鲁棒稳定性和最坏情况下的性能。
考虑一个双输入,双输出,双状态系统,其模型在状态空间矩阵中具有参数不确定性。首先创建一个不确定参数P.使用参数,使不确定A.和C矩阵。这个B矩阵碰巧是非不确定的,尽管稍后您将在模型中添加频域输入的不确定性。
p=尿素(“p”,10,“百分比”,10); A=[0p;-p0];B=眼睛(2);C=[1p;-p1];H=ss(A,B,C,[0;0])
H =不确定连续时间状态空间模型,2输出,2输入,2状态。模型不确定性由以下几个模块组成:p:不确定性真实,名义值= 10,变异性=[-10,10]%,2次出现输入“H. nominalvalue”查看名义值,“get(H)”查看所有属性,以及“H. uncertainty”与不确定性元素相互作用。
可以查看不确定系统的属性H使用得到命令
获取(H)
NominalValue: [2x2 ss] Uncertainty: [1x1 struct] A: [2x2 umat] B: [2x2 double] C: [2x2 umat] D: [2x2 double] E: [] StateName: {2x1 cell} StateUnit: {2x1 cell} InternalDelay: [0x1 double] InputDelay: [2x1 double] OutputDelay: [2x1 double] Ts: 0 TimeUnit: 'seconds' InputName: {2x1 cell} InputUnit: {2x1 cell} InputGroup: [1x1 struct] OutputName:{2x1 cell} OutputUnit: {2x1 cell} OutputGroup: [1x1 struct] Notes: [0x1 string] UserData: [] Name: " SamplingGrid: [1x1 struct] "
大多数属性的行为方式与相应的属性相同党卫军对象。房地产名义价值本身就是一个党卫军对象
为每个通道添加独立输入不确定性
的模型H不包括致动器动力学。换言之,致动器模型是所有频率的单位增益。
然而,通道1的致动器在低频时的行为具有一定的不确定性(比如10%),超过20 rad/s的高频行为没有精确建模。通道2中的致动器也有类似的说法,在低频时具有较大的不确定性(比如20%),但精度高达45 rad/s。
使用ultidyn物体三角洲1和三角洲2以及整形滤镜W1和W2将这种形式的频域不确定性添加到模型中。
W1 =补足重量的东西(。1、20、50);W2 =补足重量的东西(。2,45岁,50);Delta1 = ultidyn (“Delta1”[1]);Delta2 = ultidyn (“Delta2”[1]);G = H * blkdiag (1 + W1 * Delta1, 1 + W2 * Delta2)
G = 2输出2输入4状态的不确定连续时间状态空间模型。模型不确定性由以下块组成:Delta1: uncertainty 1x1 LTI, peak gain = 1,1 occurrences输入“G. nomalvalue”可以看到名义值,“get(G)”可以看到所有属性,“G. uncertainty”可以与不确定元素相互作用。
请注意,G是一个两输入两输出的不确定系统,依赖于三个不确定因素,三角洲1,三角洲2,P. 它有四个州,两个来自美国H一个来自整形滤镜W1和W2,嵌入其中G.
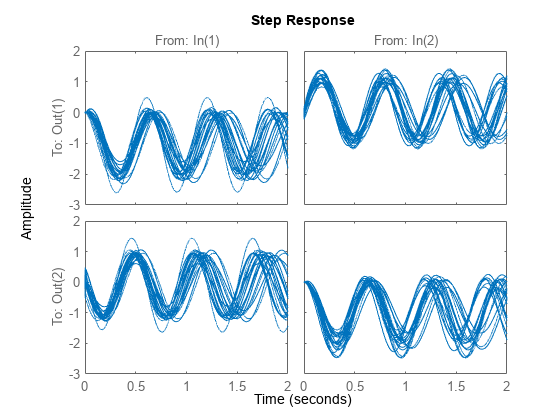
您可以绘制几个示例的2秒步进响应G自然频率的10%不确定性是显而易见的。
stepplot (G, 2)
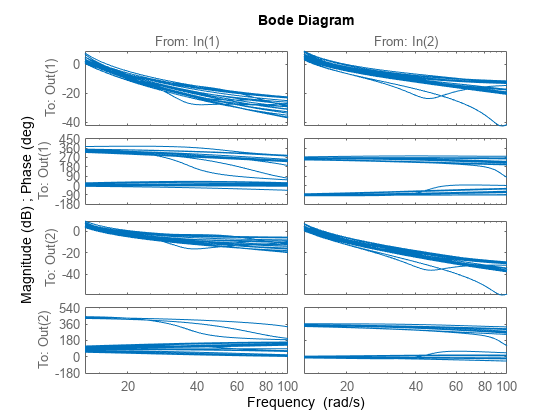
您可以创建以下对象的样本的Bode图:G。模型中的高频不确定性也很明显。为清晰起见,在共振之外开始绘制波特图。
博德普洛特(G,{13 100})
闭环鲁棒性分析
加载控制器,确认控制器为双输入双输出。
装载(“mimoKexample.mat”)尺寸(K)
有2个输出,2个输入和9个状态的状态空间模型。
您可以使用该命令loopsens形成所有标准的设备/控制器反馈配置,包括输入和输出的灵敏度和互补灵敏度。因为G是不确定的,则所有闭环系统也是不确定的。
F = loopsens (G、K)
F =结构体字段:Si:[2x2 uss]Ti:[2x2 uss]Li:[2x2 uss]So:[2x2 uss]To:[2x2 uss]Lo:[2x2 uss]PSi:[2x2 uss]CSo:[2x2 uss]Poles:[13x1双]稳定:1
F是一个有许多字段的结构。标称闭环系统的极点在F.电杆,F.Stable如果标称闭环系统稳定,则为1。在剩下的10个字段中,s代表敏感,,T或互补敏感度,以及L开环增益。的后缀我和o参考工厂的输入和输出。最后,P和C请参阅设备和控制器。
因此“透明国际”在数学上等于:
罗是G*K,CSo在数学上是一样的吗
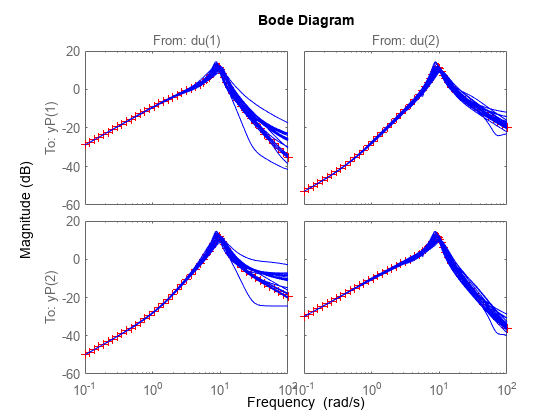
通过绘制的响应来检查扰动在设备输入到设备输出的传输F.PSi.用图表表示一些样本和标称值。
bodemag (F.PSi.NominalValue“r+”,F.PSi,“b-”{1 e 1 100})
名义稳定利润
您可以使用allmargin研究一次环路增益和相位裕度,以及diskmargin用于每次循环基于磁盘的边距和同时多变量边距。裕度是针对标称系统计算的,不反映系统中的不确定性模型G.
例如,探索电厂输出和输入的增益或相位变化的基于磁盘的裕度。(有关基于磁盘的利润率分析的一般信息,请参阅使用磁盘裕度进行稳定性分析.)
(DMo, MMo) = diskmargin (G * K);(DMi, MMi) = diskmargin (K * G);
每次循环的边距在结构数组中返回DMo和DMi.每个数组都包含两个反馈通道的一个条目。例如,为第二个反馈通道检查工厂输出的边际。
DMo(2)
ans =结构体字段:GainMargin: [0.0682 14.6726] phasmargin: [-82.2022 82.2022] DiskMargin: 1.7448 LowerBound: 1.7448 UpperBound: 1.7448 Frequency: 4.8400 worst扰动:[2x2 ss]
这个结果告诉你,在第二工厂输出的增益可以在约0.07和约14.7之间的因素变化,没有第二回路不稳定。类似地,环路可以容忍输出相位变化,最高可达±82°。
结构MMo和MMi包含两个通道中并发和独立变化的裕度。例如,检查工厂输入的多回路裕度。
MMi
MMi =结构体字段:GainMargin: [0.1186 8.4289] phasmargin: [-76.4682 76.4682] DiskMargin: 1.5758 LowerBound: 1.5758 UpperBound: 1.5790 Frequency: 5.9828 worst扰动:[2x2 ss]
该结果告诉您,在闭环系统不稳定的情况下,设备输入处的增益可以在两个通道中独立地变化约1/8到8之间的系数。系统可以承受约±76°的独立和并发相位变化。由于多回路裕度考虑了回路相互作用,因此它们往往很小比一次循环利润率低。
检查植物输出处的多回路边缘。
MMo
MMo =结构体字段:GainMargin: [0.1201 8.3280] phasmargin: [-76.3058 76.3058] DiskMargin: 1.5712 LowerBound: 1.5712 UpperBound: 1.5744 Frequency: 17.4276最差扰动:[2x2 ss]
工厂产出的边际与投入的边际相似。这个结果在多回路反馈系统中并不总是正确的。
最后,检查设备输入和输出的同时变化的裕度。
MMio = diskmargin (G、K)
MMio =结构体字段:GainMargin: [0.5676 1.7619] phasmargin: [-30.8440 30.8440] DiskMargin: 0.5517 LowerBound: 0.5517 upper: 0.5528 Frequency: 9.0688 worst扰动:[1x1 struct]
当你同时考虑所有这些变化时,其边际比单独输入或输出的小一些。然而,这些数字表示一个通常损坏的闭环系统。系统可以容忍所有输入和输出通道中的同时的显著增益变化或±30°的同时相位变化。这是植物的一部分。
鲁棒稳定性裕度
与diskmargin,确定标称多回路系统的各种稳定裕度。这些裕度仅针对标称系统计算,不反映系统明确建模的不确定性尿素的和ultidyn物体。使用详细的不确定性模型时,稳定性裕度由diskmargin可能不能准确反映系统离不稳定有多近。你可以使用罗布斯塔布计算给定不确定性的鲁棒稳定裕度。
在本例中,使用罗布斯塔布计算不确定反馈回路的鲁棒稳定裕度G和K。您可以使用中的任何闭环传递函数F = loopsens (G、K).所有这些,F.Si, F.To等具有相同的内部动力学,因此它们的稳定性特性相同。
选择= robOptions (“显示”,“上”);stabmarg = robstab (F.So选择)
计算峰值。。。完成百分比:100/100系统对于建模的不确定性是稳健稳定的。-它可以承受高达221%的建模不确定性存在一个失稳扰动,其数值相当于建模不确定性的222%。——这种扰动会导致频率为13.6 rad/s的不稳定性。
stabmarg =结构体字段:下界:2.2129上界:2.2173临界频率:13.6331
这一分析证实了diskmargin分析建议。在稳定性方面,闭环系统对由不确定参数所建模的变化具有相当的鲁棒性三角洲1,三角洲2,P事实上,系统可以承受两倍以上的建模不确定性,而不会失去闭环稳定性。
最坏情况增益分析
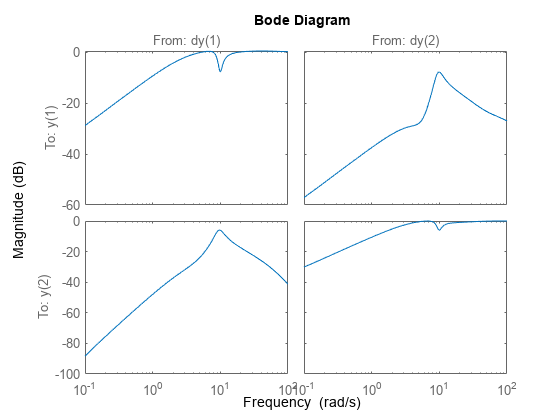
您可以绘制标称输出灵敏度函数的波特幅值。它清楚地显示了在低频时所有通道中的良好干扰抑制。
bodemag(F.So.NominalValue,{1e-1100})
可以使用以下公式计算频率响应矩阵最大奇异值的峰值:规范.
[PeakNom,频率]= getPeakGain (F.So.NominalValue)
PeakNom = 1.1317
频率=7.1300
峰值约为1.13。当不确定元素达到的最大输出灵敏度增益是多少三角洲1,三角洲2,P在它们的范围内变化?你可以用wcgain回答这个问题。
[maxgain,wcu]=wcgain(F.So);最大增益
maxgain =结构体字段:LowerBound: 2.1599 UpperBound: 2.1642 CriticalFrequency: 8.3353
分析表明,最坏情况下的增益介于2.1和2.2之间。达到峰值的频率约为8.5。
使用篡夺替换的值三角洲1,三角洲2,P达到2.1的增益。在输出互补灵敏度中进行替换,并做阶跃响应。
步骤(F.To.标称值,通常为(F.To,wcu),5)
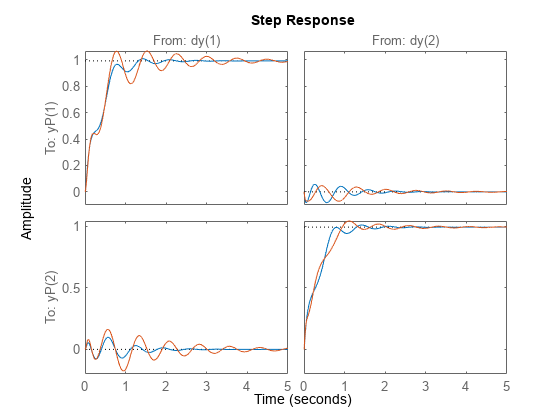
扰动响应是输出灵敏度放大方面不确定值的最差组合,并未显示指令响应的显著退化。沉降时间增加了约50%,从2增加到4,非对角耦合增加了约2倍,但仍然很小。
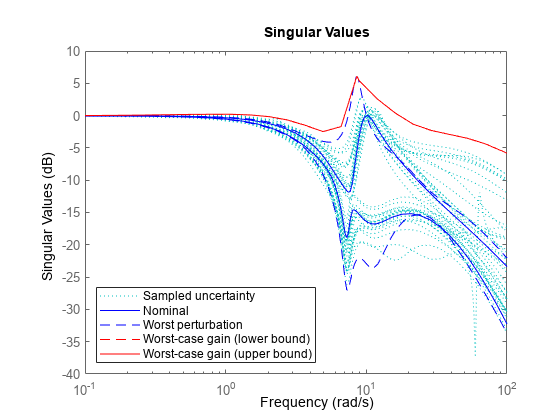
您还可以使用,在标称和采样系统旁边检查最坏情况的频率响应wcsigmaplot.
wcsigmaplot (F.To {1 e - 1100})
另请参阅
你也可以从以下列表中选择一个网站: