diskmargin.
反馈回路的基于圆盘的稳定裕度
描述
[<一种href="#mw_5a6e1229-8fd6-46bc-b502-45bc93cabd58" class="intrnllnk">计算基于磁盘的SISO或MIMO负反馈环的稳定裕度DM.那<一种href="#mw_dcc641d4-9d5d-4d49-8763-21652352eeb6" class="intrnllnk">毫米) = diskmargin (<一种href="#mw_32585735-08de-4986-8ca1-1d9932cfd67e" class="intrnllnk">L.)反馈(L,眼(N)), 在哪里N输入和输出的数量在吗L..
这diskmargin.命令返回一次循环的稳定裕度DM.和多环边距毫米.基于磁盘的裕度分析提供了比经典的增益和相位裕度更强的稳定性保证。有关磁盘裕度的一般信息,请参见<一种href="//www.tianjin-qmedu.com/help/robust/ug/stability-analysis-using-disk-margins.html" class="a">使用磁盘边距的稳定性分析.
MMIO.= diskmargin (<一种href="#mw_20199513-7944-486e-804f-1661447853b5" class="intrnllnk">P.那<一种href="#mw_85c2b828-4aa9-47c4-9af6-6bf77af4e72b" class="intrnllnk">C)
___= diskmargin (___那<一种href="#mw_6d1f844b-8833-4886-b692-b9b91526e7d9" class="intrnllnk">指定附加的倾斜参数,使模型增益和相位变化偏向增益增加(正)Sigma.)Sigma.)或增加减少(负的Sigma.).您可以使用此参数来测试稳定性边际的相对敏感性,以获得增加或减少。您可以将此参数用于前面的任何语法。
例子
MIMO反馈循环的磁盘边缘
diskmargin.计算循环和时间和多环磁盘边距。该示例说明了循环循环边缘可以对MIMO反馈循环的真正稳健性提供过于乐观的评估。各个环路的边缘可以对其他环中的小扰动敏感,并且环绕 - 一次边缘忽略了这种环路相互作用。
考虑以下图示的双通道MIMO反馈循环。

工厂模式P.是来自<一种href="//www.tianjin-qmedu.com/help/robust/ug/mimo-stability-margins-for-spinning-satellite.html" class="a">旋转卫星的MIMO稳定裕度和C为静态输出反馈增益[1 -2;0 1]。
A = [0 10;-10 0];b =眼(2);C = [1 10;-10 1];P = ss (a, b, c, 0);C = [1 -2;0 1];
计算工厂产出的基于磁盘的裕度。负反馈开环响应在工厂的输出是Lo = P * C.
lo = p * c;[DMO,MMO] = DiskMargin(LO);
检查结构阵列中返回的循环终端磁盘边距DM..每个条目DM.包含相应反馈通道的稳定裕度。
DMo (1)
ans =结构体字段:GainMargin: [0 Inf] phasmargin: [-90 90] DiskMargin: 2 LowerBound: 2 UpperBound: 2 Frequency: Inf worst扰动:[2x2 ss]
DMo (2)
ans =结构体字段:GainMargin:[0 inf] phasemargin:[-90 90] DiskMargin:2下行:2 upperbound:2频率:0谷本和平:[2x2 SS]
一次环裕度非常好(无限增益裕度和90°相位裕度)。接下来检查多循环磁盘边界mmo..这些考虑独立和并发的增益(相位)变化这两个反馈回路。这是一个更现实的评估,因为植物不确定性通常同时影响两个通道。
mmo.
mmo =结构体字段:GainMargin: [0.6839 1.4621] phasmargin: [-21.2607 21.2607] DiskMargin: 0.3754 LowerBound: 0.3754 UpperBound: 0.3762 Frequency: 0 worst扰动:[2x2 ss]
多回路的增益和相位裕度比它们的一次回路的对应物弱得多。只有当每个回路的增益变化小于1.46,或者每个回路的相位变化小于21°时,才能保证稳定。采用diskmarginplot.将增益和相位裕度形象化为频率的函数。
diskmarginplot (Lo)
通常,执行器(输入)和传感器(输出)都存在不确定性。因此,在工厂输入和输出中计算磁盘利润以及输出是一个好主意。采用李= C * P计算工厂输入的边距。对于该系统,植物输入和输出的边缘相同。
li = c * p;[DMI,MMI] = DiskMargin(Li);mmi.
MMi =结构体字段:GainMargin: [0.6839 1.4621] phasmargin: [-21.2607 21.2607] DiskMargin: 0.3754 LowerBound: 0.3754 UpperBound: 0.3762 Frequency: 0 worst扰动:[2x2 ss]
最后,您还可以计算多回路磁盘的边界增益或相位变化在输入和输出的工厂。这种方法是对稳定裕度最彻底的评估,因为它考虑了所有输入和输出通道中独立和并发的增益或相位变化。正如预期的那样,在所有三个措施中,这给予最小的增益和相位裕度。
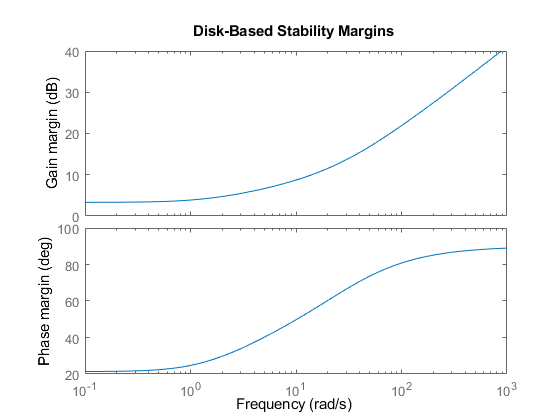
mmio = diskmargin(p,c);diskmarginplot(mmio.gainmargin)

只有当增益变化小于2 dB或相位变化小于13°时,稳定性才能得到保证。然而,这些变化发生在输入和的输出P.,因此I / O增益或阶段的总变化是两倍。
基于磁盘的margin对增益增加和减少的敏感性
默认情况下,diskmargin.计算对称增益裕度,用gmin = 1 / gmax,和相关联的相位裕度。然而,在某些系统中,环路稳定性可能对开环增益的增加或减少更为敏感。使用skew参数Sigma.来检验这种敏感性。
计算一个SISO传输函数在三个值处的磁盘裕度和相关的基于磁盘的增益和相位裕度Sigma..消极的Sigma.使计算倾向于增益减少。积极的Sigma.对增益的偏见增加了。
L = TF(25,[1 10 10 10]);dmdec = diskmargin(l,-2);dmbal = diskmargin(l,0);dminc = diskmargin(l,2);dgmdec = dmdec.gainmargin.
DGMdec =1×20.4013 1.3745
DGMbal = DMbal。GainMargin
DGMbal =1×20.6273 - 1.5942
dgminc = dminc.gainmargin.
DGMinc =1×20.7717 - 1.7247
组合在一起,这些结果表明,在没有相位变化的情况下,保持稳定性在0.4和1.72之间的相对增益变化。要了解相位保证金如何取决于这些增益变化,请绘制每个增益和相变的稳定范围diskmargin.结果。
diskmarginplot ([DGMdec; DGMbal DGMinc])传说(“σ= 2”那“σ= 0”那“σ= 2”) 标题(“增益和相位变化的稳定范围”)

该曲线表明,当增益减小时,反馈回路可以容忍更大的相位变化。换句话说,环路稳定性更敏感以增加增加。虽然Sigma.= -2产生一个大至30度的相位裕度,该大值呈小于3dB的小增益增加。然而,该图表明,当增益增加4 dB时,相位裕度下降到小于15度。相比之下,当增益减少4 dB时,它仍然大于30度。
因此,改变歪斜Sigma.能更全面地描述增益灵敏度和相位不确定度。除非您主要关注一个方向上的增益变化(增加或减少),否则不建议从单个的非零值得出结论Sigma..而是使用默认值Sigma.= 0以获得未偏见的增益和相位利润率。使用非零值时Sigma.,使用正极和负值来比较相对敏感性以增加和减少。
输入参数
L.-开环响应
动态系统模型|模型组
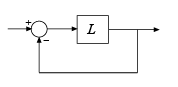
开环响应,指定为动态系统模型。L.可以是SISO或MIMO,只要它有相同数量的输入和输出。diskmargin.计算了基于圆盘的负反馈闭环系统的稳定裕度反馈(L,眼(N)).
计算正反馈系统的磁盘边距反馈(L,眼睛(N), + 1),使用diskmargin (- l).
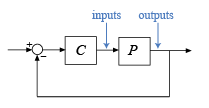
当你有一株植物P.和一个控制器C,您可以计算在工厂输入或输出的增益(或相位)变化的磁盘裕度,如下图所示。
计算植物输出的边距,设置
l = p * c.要计算工厂投入的边际,请设置
L = C * P.
L.可以是连续时间,也可以是离散时间。如果L.是一个广义状态空间模型(雄鸡或号航空母舰) 然后diskmargin.中使用所有控制设计块的电流或标称值L..
如果L.是否是一个频率响应数据模型(例如的朋友), 然后diskmargin.计算模型中表示的每个频率的边缘。该函数以最小的磁盘余量返回频率的边距。
如果L.那是一个模型数组,然后diskmargin.计算数组中每个模型的边距。
P.-植物
动态系统模型
植物,指定为一个动态系统模型。P.可以是SISO或MIMO,只要P C *有相同数量的输入和输出。diskmargin.为负反馈闭环系统计算基于磁盘的稳定性边缘。使用正反馈计算系统的磁盘边距,使用diskmargin(p,-c).
P.可以是连续时间,也可以是离散时间。如果P.是一个广义状态空间模型(雄鸡或号航空母舰) 然后diskmargin.中使用所有控制设计块的电流或标称值P..
如果P.是否是一个频率响应数据模型(例如的朋友), 然后diskmargin.计算模型中表示的每个频率的边缘。该函数以最小的磁盘余量返回频率的边距。
C-控制器
动态系统模型
控制器,指定为动态系统模型。C可以是SISO或MIMO,只要P C *有相同数量的输入和输出。diskmargin.为负反馈闭环系统计算基于磁盘的稳定性边缘。使用正反馈计算系统的磁盘边距,使用diskmargin(p,-c).
C可以是连续时间,也可以是离散时间。如果C是一个广义状态空间模型(雄鸡或号航空母舰) 然后diskmargin.中使用所有控制设计块的电流或标称值C.
如果C是否是一个频率响应数据模型(例如的朋友), 然后diskmargin.计算模型中表示的每个频率的边缘。该函数以最小的磁盘余量返回频率的边距。
Sigma.-斜
0.(默认)|真正的标量
用于计算稳定性边界的不确定区域的倾斜,指定为实标量值。这个参数使用于模拟增益和相位变化的不确定性偏向增益增加或增益减少。
默认的
Sigma.= 0使用范围内的增益变化平衡模型[gmin, gmax],gmin = 1 / gmax.积极的
Sigma.使用比减少更多增加增加的模型(gmax> 1 / gmin).消极的
Sigma.使用比增加更大的增加(gmin <1 / gmax).
使用默认的Sigma.= 0以获得未偏见的增益和相位利润率。通过比较积极和负面获得的边距,可以测试相对敏感性以增加增加和减少Sigma.值。例如,请参见<一种href="//www.tianjin-qmedu.com/help/robust/ref/diskmargin.html" class="intrnllnk">基于磁盘的margin对增益增加和减少的敏感性.有关如何选择的更详细信息Sigma.影响保证金计算,见<一种href="//www.tianjin-qmedu.com/help/robust/ug/stability-analysis-using-disk-margins.html" class="a">使用磁盘边距的稳定性分析.
输出参数
DM.- 每个反馈频道的磁盘边距
结构|结构数组
每个反馈通道的磁盘边距,所有其他循环关闭,作为SISO反馈循环的结构返回,或者N-by-1结构数组的MIMO环路N反馈渠道。田野DM(我)是:
| 场 | 价值 |
|---|---|
GainMargin |
基于磁盘的相应反馈信道的增益边缘,作为表单的向量返回[gmin, gmax].这些值以绝对单位表示环路增益在保持稳定的同时可以减少或增加的量。例如,如果DM(i).gainmargin = [0.8,1.25]然后得到一世th循环可以乘以0.8和1.25之间的任何因素,而不会导致不稳定性。什么时候<一种href="#mw_6d1f844b-8833-4886-b692-b9b91526e7d9" class="intrnllnk">Sigma.= 0,gmin = 1 / gmax.如果开环增益可以改变符号而不失去稳定性,gmin在负的足够大的情况下是否可以小于零Sigma..如果标称闭环系统不稳定,那么DM(i).gainmargin = [1 1]. |
PhaseMargin |
基于磁盘的相裕度对应的反馈通道,返回为矢量形式(下午、晚上)程度。这些值表达了该信道中的环形阶段在保持稳定性的同时可以降低或增加的量。如果闭环系统不稳定,那么DM(我)。P.haseMargin = [0 0]. |
diskmargin. |
最大ɑ兼容相应反馈通道的闭环稳定性。ɑ参数化循环响应中的不确定性(参见<一种href="//www.tianjin-qmedu.com/help/robust/ref/diskmargin.html" class="intrnllnk">算法).如果闭环系统不稳定,那么DM(我)。DiskMargin = 0. |
下界 |
磁盘边距下限。这个值与diskmargin.. |
上行 |
磁盘边距上限。该值表示系统的实际磁盘裕度的上限。换句话说,磁盘裕度保证不会比下界不比上行. |
频率 |
对应环路信道出现最弱余量的频率。此值位于RAD /TimeUnit, 在哪里TimeUnit是TimeUnit的属性<一种href="#mw_32585735-08de-4986-8ca1-1d9932cfd67e" class="intrnllnk">L.. |
WorstPerturbation |
驱动反馈回路不稳定的最小增益和相位变化,返回为状态空间(
这种状态空间模型是表格的对角线扰动 查阅更多有关口译的资料 在分析非线性系统的线性近似时,它可以注入它 |
什么时候l = p * c是一个系统的开环响应,包括控制器和工厂,每个通道都有单位负反馈,DM.包含植物输出的变化的稳定性边缘。计算植物输入的变化的稳定性边距,使用L = C * P.要计算在设备输入和输出同时独立变化的稳定裕度,使用mmio = diskmargin(p,c).
什么时候L.是模型阵列,DM.是否有额外的维数对应于数组的维数L..例如,如果L.那么,这是一个由两输入两输出模型组成的1 × 3数组吗DM.是一个2乘3的结构数组。DM(j,k)的页边距jth反馈通道K.th阵列中的模型。
毫米- MultiLoop磁盘边距
结构
多环磁盘边距,作为结构返回。增益(或阶段)边缘量化系统可以在剩余稳定的同时在所有反馈信道中耐受系统的增益变化(或相变)。因此,毫米是无论系统中的反馈信道数量如何,都是一个结构。(对于SISO系统,毫米=<一种href="#mw_5a6e1229-8fd6-46bc-b502-45bc93cabd58" class="intrnllnk">DM.)。田野毫米是:
| 场 | 价值 |
|---|---|
GainMargin |
基于磁盘的多环增益边距,以矢量形式返回[gmin, gmax].这些值以绝对单位表示环路增益在保持稳定的同时可以在所有通道中独立和并发地变化的量。例如,如果mm.gainmargin = [0.8,1.25]然后,所有环路的增益可以乘以0.8到1.25之间的任何因素,而不会造成不稳定。什么时候<一种href="#mw_6d1f844b-8833-4886-b692-b9b91526e7d9" class="intrnllnk">Sigma.= 0,gmin = 1 / gmax. |
PhaseMargin |
基于多环磁盘的阶段余量,作为表单的向量返回(下午、晚上)程度。这些值表达了环形阶段在保持稳定性的同时和同时在所有信道中变化的量。 |
diskmargin. |
最大ɑ与闭环稳定性兼容。ɑ参数化循环响应中的不确定性(参见<一种href="//www.tianjin-qmedu.com/help/robust/ref/diskmargin.html" class="intrnllnk">算法). |
下界 |
磁盘边距下限。这个值与diskmargin.. |
上行 |
磁盘边距上限。该值表示系统的实际磁盘裕度的上限。换句话说,磁盘裕度保证不会比下界不比上行. |
频率 |
频率发生最弱的边缘。此值位于RAD /TimeUnit, 在哪里TimeUnit是TimeUnit的属性<一种href="#mw_32585735-08de-4986-8ca1-1d9932cfd67e" class="intrnllnk">L.. |
WorstPerturbation |
驱动反馈回路不稳定的最小增益和相位变化,返回为状态空间(
这种状态空间模型是表格的对角线扰动 查阅更多有关口译的资料 在分析非线性系统的线性近似时,它可以注入它 |
什么时候l = p * c是一个系统的开环响应,包括控制器和工厂,每个通道都有单位负反馈,毫米包含植物输出的变化的稳定性边缘。计算植物输入的变化的稳定性边距,使用L = C * P.要计算在设备输入和输出同时独立变化的稳定裕度,使用mmio = diskmargin(p,c).
什么时候L.是模型阵列,毫米是一个结构阵列,每个模型都有一个条目L..
MMIO.-所有输入和输出通道中独立变化的磁盘裕度
结构
在装置的输入和输出通道上同时应用的独立变异的圆盘余量<一种href="#mw_20199513-7944-486e-804f-1661447853b5" class="intrnllnk">P.,作为具有与之相同的结构的结构返回<一种href="#mw_dcc641d4-9d5d-4d49-8763-21652352eeb6" class="intrnllnk">毫米.
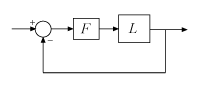
对于同时应用于输入和输出的变化WorstPerturbation字段本身就是一个有字段的结构输入和输出.每个字段包含一个状态空间模型,例如forFi (s) = MMIO.WorstPerturbation.Input和Fo (s) = MMIO.WorstPerturbation.Output,下图的系统略微不稳定,频率稳定边界杆MMIO。Frequency.
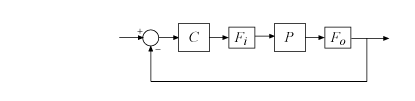
这些状态空间模型输入和输出对角线扰动是这种形式吗f(s)= diag(f1(s),...,fn(s)).每个fj (s)是一个实参数动态系统,实现了最坏情况下复增益和相位变化应用于反馈回路的每个通道。
提示
diskmargin.假设负面反馈。计算正反馈系统的磁盘边距,使用diskmargin (- l)或diskmargin(p,-c).为在Simulink中建模的系统计算磁盘裕度万博1manbetx®,首先将模型线性化,得到某一工作点的开环响应。然后,用
diskmargin.计算线性化系统的稳定裕度。有关更多信息,请参见<一种href="//www.tianjin-qmedu.com/help/robust/ug/stability-margin-of-a-simulink-model.html" class="a">Simulink模型的稳定裕度万博1manbetx.要计算经典增益和相位裕度,使用<一种href="//www.tianjin-qmedu.com/help/control/ref/lti.allmargin.html">
allmargin..您可以使用磁盘边距可视化<一种href="//www.tianjin-qmedu.com/help/robust/ref/lti.diskmarginplot.html">
diskmarginplot..
算法
兼容性的考虑
参考文献
[1] Blight, James D, R. Lane Dailey和Dagfinn Gangsaas。“基于多变量技术的飞机实用控制律设计”。国际控制杂志59,没有。1(1994年1月):93-137。<一种href="https://doi.org/10.1080/00207179408923071" target="_blank">https://doi.org/10.1080/00207179408923071.
[2] Seiler,Peter,Andrew Packard和Pascal Gahinet。“磁盘边缘介绍[讲座笔记]。”IEEE控制系统杂志40,不。5(2020年10月):78-95。
也可以看看
你也可以从以下列表中选择一个网站: