配置ROS网络地址
在模型初始化期间,Simulink连接到ROS主机,并创建万博1manbetx与模型关联的节点。ROS主URI和节点主机在“配置ROS网络地址”对话框中指定。你可以在模拟通过选择ROS工具箱> ROS网络.
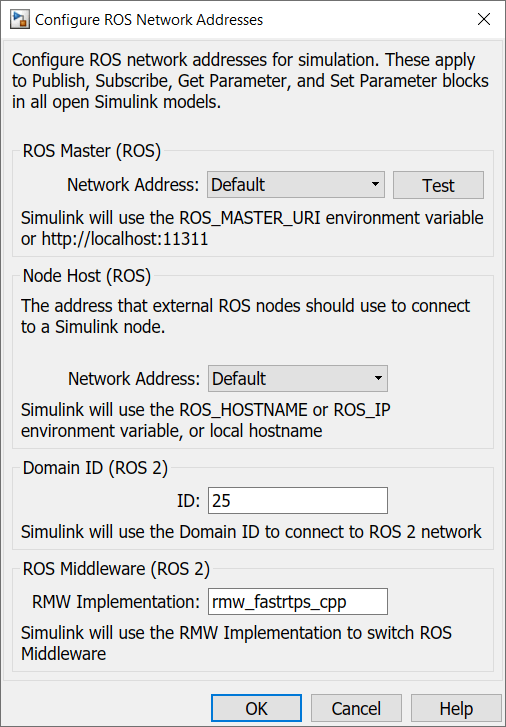
的网络地址参数可设置为默认的或自定义.
对于ROS主URI,如果网络地址设置为默认的,仿万博1manbetx真软件®使用以下规则设置ROS主URI:
使用
ROS_MASTER_URI设置为环境变量。如果一个MATLAB®如果全局ROS节点存在,则使用与全局节点关联的Master URI。全局节点是自动创建的
rosinit被称为。使用地址
http://localhost:11311如果其他两条规则不适用。
对于节点主机,如果网络地址设置为默认的, 万博1manbetxSimulink设置ROS节点主机的规则如下:
使用
ROS_HOSTNAME设置为环境变量。使用
ROS_IP设置为环境变量。如果可用,请使用系统上第一个网络接口的主机名或IP地址。
使用地址
http://localhost:11311如果其他规则不适用。
对于两者,这些规则与MATLAB用于解析其ROS网络地址的规则相同。
如果你愿意的话自定义,您可以设置如下所示的所有变量。这将覆盖环境变量。
注意:这些地址保存在MATLAB首选项中,而不是模型中。因此,这些信息将在所有Simulink模型和同一版本的多个MATLAB安装中共享。万博1manbetx
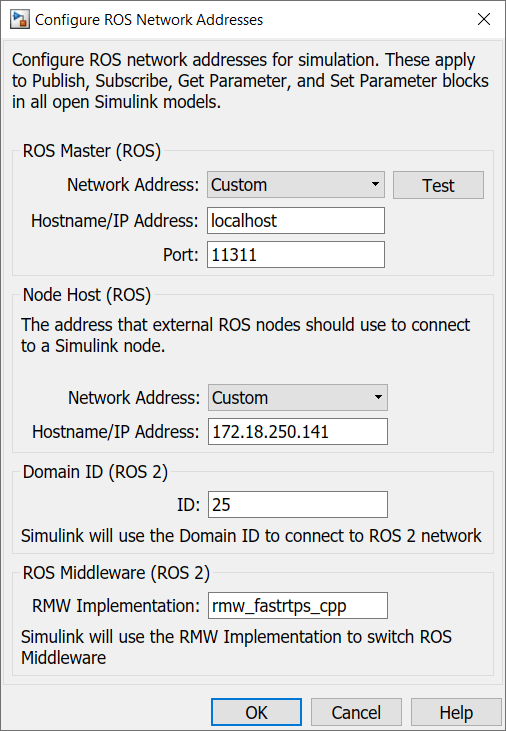
你也可以使用测试按钮,以确保您可以连接到ROS主机。如果您得到一个错误,请调用rosinit要设置本地ROS网络,或者如果指定了远程ROS主服务器,请检查设置是否正确。
在部署独立节点时,生成的代码中不使用自定义ROS主主机或节点主机设置。
另请参阅
相关的例子
更多关于
您也可以从以下列表中选择一个网站: