从一个真正的乌龟机器人开始
这个例子展示了如何使用MATLAB®ROS接口连接到TurtleBot®。您可以使用此接口从MATLAB连接到广泛支持ros的硬件。万博1manbetx如果你在Gazebo®中使用TurtleBot,请参考开始使用露台和模拟的高跷机器人的例子。
设置新的TurtleBot硬件
下面的步骤使用乌龟机器人3华夫饼派平台(https://www.turtlebot.com/).这套套件附带了一个树莓派,它有一个预装的ROS拷贝和适当的TurtleBot软件。此过程假设您使用的是具有类似配置的新TurtleBot。如果您已经在使用TurtleBot并通过外部计算机与它通信,则不要执行此过程.
打开乌龟机器人的包装,确保电源已连接。
打开树莓派。
确保您已经设置了一个网络,将主机(使用MATLAB的那台)连接到TurtleBot上的树莓派。使用无线路由器或以太网电缆。
在树莓派上打开终端并运行
ifconfig.显示与您连接的网络相关联的IP地址。

通过执行以下命令在TurtleBot上设置适当的环境变量。这些命令只执行一次。
echo export ROS_IP=IP_OF_TURTLEBOT >> ~/。bashrc echo export ROS_MASTER_URI=http://IP_OF_TURTLEBOT:11311 >> ~/。bashrc sudo sh -c 'echo export ROS_IP=IP_OF_TURTLEBOT >> /etc/ rose /setup.sh'
确保你可以从树莓派ping主机:
平IP_OF_HOST_COMPUTER
一个成功的平如左图所示。失败的平如图所示。

注意:这些环境变量必须始终为TurtleBot分配正确的IP地址。当TurtleBot树莓派的IP地址发生变化时,需要同时使用上述命令修改环境变量。
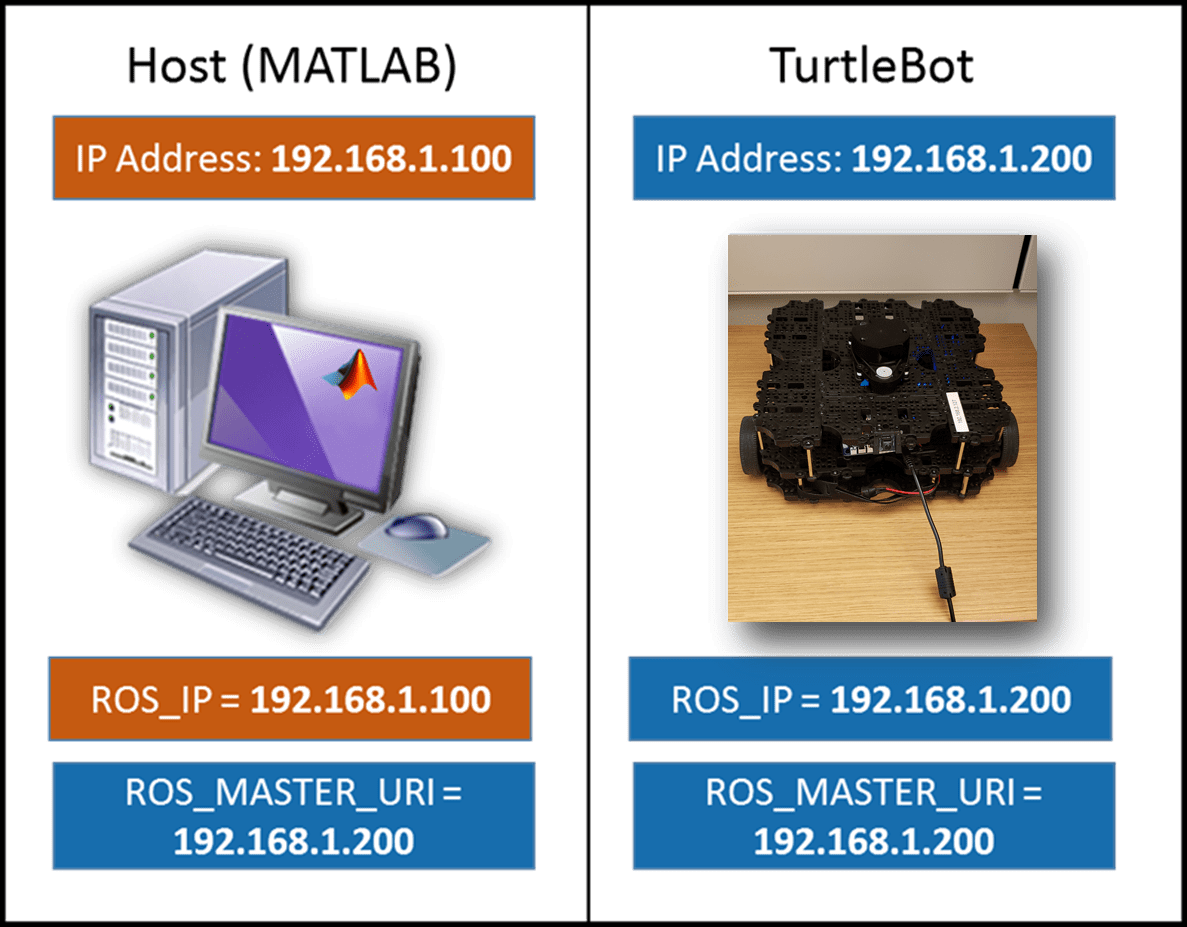
下面的图表说明了如何正确分配环境变量:
在TurtleBot Raspberry Pi上的不同终端中输入以下命令,启动TurtleBot 3中的激光雷达和相机传感器:
roslaunch turtlebot3_bringup turtlebot3_core。发射rolaunch turtlebot3_bringup turtlebot3_lidar。Launch rolaunch turtlebot3_bringup turtlebot3_rpicamera.launch
可能的输出如下所示。

设置现有的TurtleBot硬件
如果TurtleBot的设置与前面描述的设置不同,在尝试通过MATLAB进行通信之前,请确保以下信息为真:
您已设置网络,以便可以ping主机。
您可以访问以下主题。在TurtleBot树莓派上,输入
rostopic列表看主题。
/odom/cmd_vel/reset/scan
主机的设置
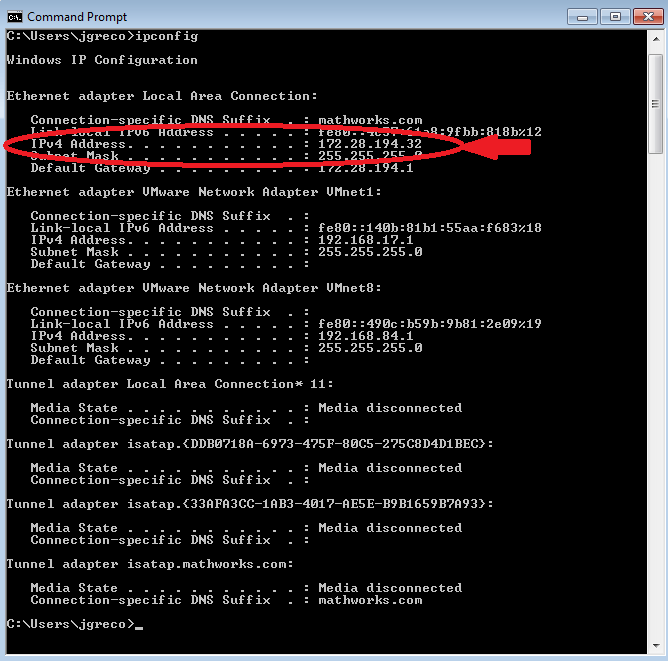
在网络上,找到主机的IP地址。在Windows®机器上,在命令提示符处输入
ipconfig.在Mac或Linux®机器上,打开终端并输入ifconfig.这里有一个例子ipconfig:
确保你能ping通笔记本:
平IP_OF_TURTLEBOT
一个成功的平是先显示,然后是一个不成功的平.

下一个步骤
请参阅下一个示例:与乌龟机器人交流
你也可以从以下列表中选择一个网站: