开始凉亭和模拟的火炬
此示例显示了如何设置Gazebo®模拟器引擎。此示例为您准备使用凉亭进一步探索,也可以通过模拟的Turtlebot®探索。
凉亭是一种模拟器,允许您使用物理场景实际测试和实验。Gazebo是一种有用的机器人工具,因为它允许您快速创建和运行实验,并使用实体物理和良好的图形。MATLAB®通过ROS界面连接到凉亭。
下载虚拟机
您可以下载已安装ROS和Gazebo的虚拟机映像。此虚拟机基于Ubuntu®Linux®,预先配置为支持ROS Toolbox™中的示例。万博1manbetx
下载并安装ROS虚拟机。
启动虚拟机。
在Ubuntu桌面上,您可以看到多个凉亭世界启动脚本,以及其他实用程序快捷方式。对于TurtleBot®示例,使用凉亭空那凉亭房子那凉亭办公室, 或者凉亭标志追随者ROS图标。

点击凉亭房子。世界开放。

笔记:如果凉亭屏幕完全是黑色的,则通过最小化刷新图像,然后最大化。
在Ubuntu虚拟机中打开一个新终端。
类型
ifconfig.并返回查看虚拟机的网络信息。在下面
eth0., 这INET ADDR.显示虚拟机的IP地址。

必须设置两个ROS环境变量以设置网络:ROS_MASTER_URI和ROS_IP。如果您使用Linux®虚拟机的桌面中的演示,则通常会在启动时自动设置这些变量。
(可选)如果您使用的是您自己的虚拟机通过在终端中执行以下命令设置变量。代替
ip_of_vm.通过IP地址通过ifconfig.):
Echo Export ROS_Master_URI = http:// ip_of_vm:11311 >>〜/ .bashrc echo导出ros_ip = ip_of_vm >>〜/ .bashrc
使用备受检查环境变量
echo $ env_var.(用适当的环境变量替换env_var)。您可以关闭并重新打开您的终端以使其生效。

下图说明了正确的环境变量分配(具有假IP地址)

连接到现有的凉亭模拟器
如果您已经在Linux发行版上运行凉亭,请设置如下所述的模拟器:
在ROS网站上,下载Turtlebot的相应包装。
按照ROS网站上的说明获取在模拟凉亭环境中运行的Turtlebot。
确保环境变量适当地设置,您可以在主机和凉亭计算机之间来回ping。有很多方法可以设置网络。这连接到ROS网络示例包含有关如何验证ROS网络中设备之间连接的提示。
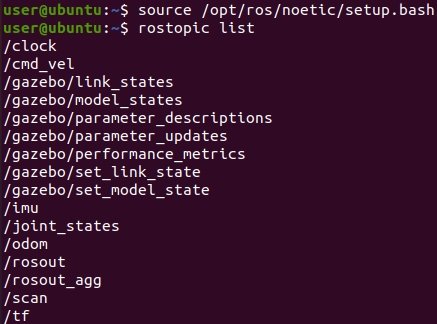
要在Linux机器端子中使用任何ROS命令,需要设置终端环境以使用正确的ROS安装。在运行任何ROS命令之前,在终端提供适当的ROS环境设置脚本。在VM中,命令是:
来源/opt/ros/melodic/setup.bash.确保您可以访问以下主题。在Linux机器上的终端中,输入
叛逆名单看到至少这些可用的主题。
/ clock / cmd_vel / imu / odom / scan / tf
主机设置
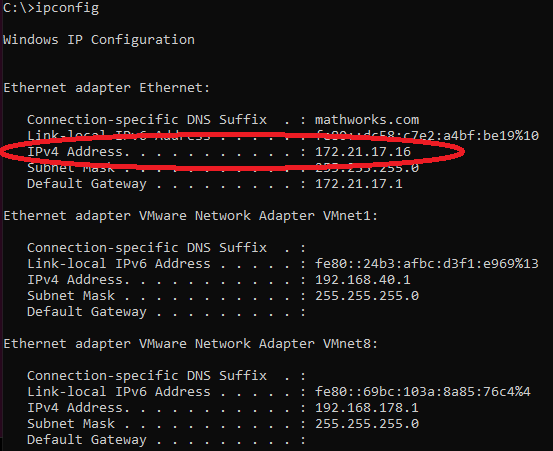
在网络上查找主机的IP地址。在Windows®计算机上,在命令提示符下,键入
ipconfig.。在Mac或Linux机器上,打开终端和类型ifconfig.。一个例子ipconfig.显示。
笔记:连接类型可以根据连接到笔记本电脑的连接方式而异。在这种情况下,您使用以太网,但是,在许多情况下,无线(WLAN)是相应的连接。
ping模拟器机
ping ip_of_vm.。一个成功的p首先显示,后跟一个不成功的p。
下一步
有关更多Gazebo示例,请参阅:使用ROS挑选凉亭的工作流程(机器人系统工具箱)
对于Turtlebot示例,请参阅:与Turtlebot沟通
您还可以从以下列表中选择一个网站: