ROS 2自定义消息支持万博1manbetx
自定义消息是用户定义的消息,可用于扩展ROS 2中当前支持的消息类型集。如果发送和接收支持的消息类型,则无需使用自定义消息。若要查看支持的消息类型列表,请致电万博1manbetxros2消息列表在MATLAB®命令窗口中。有关支持的ROS 2消息的更多信息,请参阅万博1manbetx使用基本ROS 2消息.
如果这是您第一次使用ROS 2自定义消息,请检查ROS系统要求.
自定义消息内容
ROS 2自定义消息在包含味精目录这个味精文件夹包含所有自定义邮件类型定义。例如,包示例_b_msgs,在风俗文件夹,具有以下文件夹和文件结构。
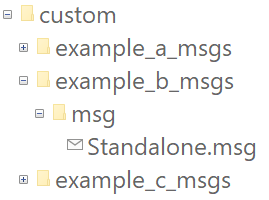
该包包含一种自定义消息类型,Standalone.msg.MATLAB使用这些文件生成使用包中包含的自定义消息所需的文件。有关消息命名约定的详细信息,请参阅ROS 2接口定义.
在本例中,您将完成在MATLAB®中创建ROS 2自定义消息的过程。您必须拥有包含所需消息的ROS 2包味精文件
确保自定义邮件包正确后,记下文件夹路径位置,然后调用ros2genmsg下面的示例提供了三条消息示例\u包\u a,示例\u包\u b和示例\u包\u c有依赖关系的。此示例还说明,您可以使用包含多条消息的文件夹,并同时生成所有消息。
要在MATLAB中设置自定义邮件,请在新会话中打开MATLAB。将自定义邮件文件夹放置在某个位置,并记下文件夹路径。在本例中,自定义邮件接口文件夹位于当前目录中。如果要在单独位置创建自定义邮件包,请提供该文件夹的适当路径t自定义消息包。
folderPath=fullfile(pwd,“定制”);复制文件(“示例*MSG”,folderPath);
指定自定义邮件文件的文件夹路径并调用ros2genmsg为MATLAB创建自定义消息。
ros2genmsg(folderPath)
识别文件夹“U:/Documents/MATLAB/Examples/ros-ex44405863/custom”中的消息文件。完成。正在验证文件夹“U:/Documents/MATLAB/Examples/ros-ex44405863/custom”中的消息文件。完成。[3/3]为自定义消息包生成MATLAB接口。。。完成。在文件夹“U:/Documents/MATLAB/Examples/ros-ex44405863/custom/MATLAB\U msg\U gen/win64”中运行colcon构建。在建工程。这可能需要几分钟。。。生成成功。生成日志
呼叫ros2消息列表验证新自定义消息的创建。
您现在可以将上面创建的自定义消息用作标准消息。有关发送和接收消息的更多信息,请参阅与ROS 2发布者和订阅者交换数据.
创建要使用的发布服务器示例\u包\u b/独立消息
node=ros2node(“/node_1”); pub=ros2publisher(节点,“/example\u主题”,“示例_b_msgs/独立”);
在同一主题上创建订阅服务器。
sub=ros2subscriber(节点,“/example\u主题”);
创建一条消息并发送该消息。
自定义消息=ros2message(“示例_b_msgs/独立”); 自定义_msg.int_属性=uint32(12);自定义\u msg.string\u属性='这是ROS 2自定义消息示例'; 发送(发布、自定义消息);暂停(3)%请等待几秒钟,以便消息到达
使用最新消息字段以了解订户最近收到的消息。
最新消息
ans=带字段的结构:int_属性:12字符串_属性:“这是ROS 2自定义消息示例”
删除创建的ROS对象。
清楚的节点酒吧附属的
您还可以从以下列表中选择网站: