factoran
因子分析
句法
拉姆达= factoran(X,M)
为λ,PSI] = factoran(X,M)
为λ,PSI,T] = factoran(X,M)
为λ,PSI,T,统计] = factoran(X,M)
为λ,PSI,T,统计,F] = factoran(X,M)
[...] = factoran(...,参数1,VAL1,参数2,VAL2,...)
描述
拉姆达= factoran(X,M)返回最大似然估计,拉姆达的因素负荷量矩阵,在一个共同的因子分析模型的米常见的因素。X是一个ñ-通过-d矩阵,其中每行是一个观察d变量。该(I,J)的第i个元素d-通过-米矩阵拉姆达是的系数,或装载,Ĵ对于个因素一世个变量。默认,factoran调用函数rotatefactors旋转使用估计因子载荷“最大方差法”选项。
为λ,PSI] = factoran(X,M)的特定方差作为列向量也返回最大似然估计PSI长d。
为λ,PSI,T] = factoran(X,M)也返回米-通过-米因子载荷旋转矩阵Ť。
为λ,PSI,T,统计] = factoran(X,M)也返回结构统计关于零假设,H包含信息0,那的共同因素的数目是米。统计包括以下字段:
| 领域 | 描述 |
|---|---|
loglike |
最大化数似然值 |
DFE |
误差自由度= |
CHISQ |
对于零假设近似卡方统计 |
p |
右尾显着性水平的零假设 |
factoran不计算CHISQ和p除非场DFE是积极的,所有具体方差估计在PSI是积极的(见海伍德案下面)。如果X是协方差矩阵,那么你还必须指定'NOBS'参数,如果你想factoran计算CHISQ和p领域。
为λ,PSI,T,统计,F] = factoran(X,M)也返回,在F,共同因子,称为因子分数预测。F是一个ñ-通过-米矩阵,其中每行是一个预测米常见的因素。如果X是协方差矩阵,factoran不能计算F。factoran旋转F使用相同的标准,作为拉姆达。
[...] = factoran(...,使您可以指定可选的参数名/值对控制模型拟合和输出。以下是有效的参数/值对。参数1,VAL1,参数2,VAL2,...)
| 参数 | 值 | |
|---|---|---|
'的xtype' |
输入在矩阵型 |
|
'数据' |
原始数据(默认) |
|
|
正定协方差或相关矩阵 |
|
“分数” |
预测因子得分方法。 |
|
|
用于加权的最小二乘同义词估计,治疗 |
|
|
同义词最小均方误差预测,即相当于岭回归 |
|
'开始' |
起点为特定差异 |
|
|
选 |
|
|
选择的起始载体作为比例因子倍 |
|
正整数 |
进行最大似然配合的给定数量,每个初始化为与 |
|
矩阵 |
执行一个最大似然适合指定的矩阵的每一列。该 |
|
“旋转” |
方法用来旋转因子载荷和分数。 |
|
|
不进行旋转。 |
|
|
在orthomax旋转的特殊情况。使用 |
|
|
正交旋转最大化基础上的负载的变化的标准。 使用 |
|
|
在orthomax旋转(默认)的特殊情况。使用 |
|
|
执行任一种倾斜旋转(默认值)或正交旋转以最佳匹配指定的模式矩阵。使用 |
|
|
执行任一倾斜(默认值)或正交旋转以最佳匹配在最小二乘意义上的指定的目标矩阵。 使用 |
|
|
进行倾斜普鲁克旋转通过确定的目标矩阵 使用 |
|
|
在orthomax旋转(默认)的特殊情况。使用 |
|
|
在orthomax旋转(默认)的特殊情况。使用 |
|
功能 |
功能句柄形式的旋转功能 [B,T] = myrotation(A,...) 哪里 使用 |
|
“系数_” |
系数,通常表示为γ,确定具体的 |
|
“正常化” |
标志指示加载矩阵是否应当是行归一化(1)或左未标准化(0)用于 |
|
'RELTOL' |
对于相对收敛容差 |
|
“麦克斯特” |
迭代限制了 |
|
'目标' |
对于目标因子载荷矩阵 |
|
'类型' |
类型 |
|
'功率' |
指数创建在目标矩阵 |
|
'userargs' |
表示用于用户定义的旋转功能的附加的输入值的开始。 |
|
'NOBS' |
如果 |
|
'三角洲' |
下界特定差异 |
|
'optimopts' |
结构指定控制参数的迭代算法函数用来计算最大似然估计。与功能来创建此结构 |
|
例子
估计和情节因子载荷
加载样本数据。
加载carbig
定义变量矩阵。
X = [加速位移马力MPG重量];X = X(所有(〜isnan(X),2),:);
估计使用最小均方误差预测有两个共同的因素,因子分析因子载荷。
为λ,帕普西,T,统计,F] = factoran(X,2,“分数”,“回归”);INV(T'* T);的F%估计相关矩阵,==眼(2)拉姆达*拉姆达” + DIAG(PSI);%估计相关矩阵拉姆达* INV(T);%Unrotate的负荷F * T';%Unrotate因子得分
创建的两个因素双标图。
双标图(拉姆达'行宽',2,'MarkerSize',20)

使用估计的协方差(或相关)矩阵的因子载荷。
为λ,Psi和T] = factoran(COV(X),2,'的xtype','COV')
波长=5×2-0.2432 -0.8500 0.8773 0.3871 0.7618 0.5930 -0.7978 -0.2786 0.9692 0.2129
PSI =5×10.2184 0.0804 0.0680 0.2859 0.0152
T =2×20.9476 0.3195 0.3195 -0.9476
%为λ,Psi和T] = factoran(corrcoef(X),2, '的xtype', 'COV')
虽然估计是相同的,使用的协方差矩阵,而不是原始数据不会让你要求的分数或显着性水平。
使用PROMAX旋转。
为λ,帕普西,T,统计,F] = factoran(X,2,“旋转”,'PROMAX',...'powerpm',4);INV(T'* T)%F的估计的相关,
ANS =2×21.0000 -0.6391 -0.6391 1.0000
%不再眼(2)拉姆达* INV(T '* T)*拉姆达' + DIAG(PSI)%X的估计的相关
ANS =5×51.0000 -0.5424 -0.6893 0.4309 -0.4167 -0.5424 1.0000 0.8979 -0.8078 0.9328 -0.6893 0.8979 1.0000 -0.7730 0.8647 0.4309 -0.8078 -0.7730 1.0000 -0.8326 -0.4167 0.9328 0.8647 -0.8326 1.0000
绘制具有叠加斜轴未旋转的变量。
INVT = INV(T);Lambda0 = LAMBDA * INVT;图()行([ - INVT(1,1)INVT(1,1)的NaN -invT(2,1)INVT(2,1)],...[-invT(1,2)INVT(1,2)的NaN -invT(2,2)INVT(2,2)],...'颜色','R','行宽',2)格上保持上双标图(Lambda0,'行宽',2,'MarkerSize',20)xlabel(“的未旋转的因子1荷载”)ylabel(“的未旋转的因子2荷载”)

暗算倾斜轴旋转的变量。
图()双标图(LAMBDA,'行宽',2,'MarkerSize',20)

用户定义的旋转功能
语法传递附加参数给一个用户定义的旋转功能:
为λ,Psi和T] =...factoran(X,2,“旋转”@ myrotation,'userargs'1,'二');
更多关于
提示
观察数据变量
在所观察的数据矩阵中的变量X必须是线性无关的,即COV(X)必须满秩,最大似然估计成功。factoran降低了原始数据和协方差矩阵的相关矩阵进行配合之前。
factoran标准化所观察的数据X到零均值和单位方差估计负载之前拉姆达。这不会影响模型拟合,因为在这种模式极大似然估计是不变的规模。然而,拉姆达和PSI在标准化的变量而言,即返回,拉姆达*拉姆达'+ DIAG(psi)的是原始数据的相关矩阵的估计X(虽然不是倾斜旋转之后)。看到估计和情节因子载荷和用户定义的旋转功能。
海伍德案
如果要素PSI等于的值'三角洲'参数(即,它们基本上是零)时,配合已知为海沃德的情况下,并且将所得的估算解释是有问题的。具体而言,可以有可能性的多个局部最大值,每一个与负载和特定差异的不同估计。海沃德例可以指示过度拟合(即,米过大),但也可以是欠拟合的结果。
因子载荷和分数的旋转
除非你明确地使用指定没有旋转“旋转”参数,factoran旋转估计因子载荷,拉姆达和各因子得分,F。输出矩阵Ť用于旋转的载荷,即拉姆达= lambda0 * T,其中lambda0是负载的初始(未旋转)MLE。Ť为旋转正交的正交矩阵,并且对于无旋转单位矩阵。的逆Ť被称为主轴线的旋转矩阵,而Ť本身与参考轴的旋转矩阵。对于正交旋转,这两个是相同的。
factoran计算已经由旋转因子得分INV(T')即F = F0 * INV(T'),其中F0包含未旋转的预测。的估计协方差F是INV(T'* T),这对于正交或没有旋转,是单位矩阵。因子载荷和分数的旋转是企图在最大似然估计后的负荷矩阵以创建更容易解释结构。
参考
[1]哈曼,H. H.现代因素分析。第3版。芝加哥:芝加哥大学出版社,1976年大学。
[2]Jöreskog,K. G.“一些贡献最大似然因子分析”。Psychometrika。卷。32,第4期,1967年,第443-482。
[3]罗礼,D.N。,和A. E.麦克斯韦。因子分析的统计方法。第二版。纽约:美国爱思唯尔出版公司,1971。
扩展功能
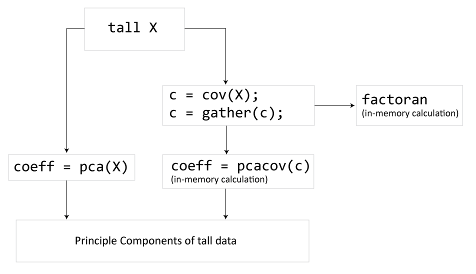
高大的数组
与具有较适合在内存中更多的行阵列计算。
pcacov和factoran做不直接在高大的数组。取而代之的是,使用C =聚(COV(X))以计算一个高大的阵列的协方差矩阵。然后,你可以使用pcacov要么factoran在内存中的协方差矩阵。另外,您也可以使用PCA直接在一个高大的阵列。
欲了解更多信息,请参阅对于超出的内存数据高大数组(MATLAB)。
R2006a前推出
您还可以选择从下面的列表中的网站: