选择不同的机器人自主模式使用烦恼V5机器人的大脑
这个例子展示了如何使用仿真软件®编码器™支持包烦恼®V5机器万博1manbetx人大脑和创建自万博1manbetx定义用户界面的液晶触摸屏烦恼V5机器人大脑使用显示和按钮仿真软件仪表板块。
介绍
这个示例允许您实现不同引风机的例程和它们之间选择使用触摸屏在烦恼V5的大脑。
先决条件
如果你是新模型,观察万博1manbetx万博1manbetx仿真软件快速入门视频。
所需的硬件
要运行这个示例,您需要以下硬件:
烦恼EDR版本5的机器人的大脑
V5机器人电池
V5控制器
VEXnet竞争开关
USB微电缆
步骤1 -硬件连接
1。V5机器人电池连接到烦恼EDR版本5的机器人的大脑。
2。连接左智能汽车港1和对智能汽车港口10使用智能电缆。
3所示。连接臂智能汽车港口8和爪智能汽车港口3使用智能电缆。
4所示。连接VEXnet竞争转向V5控制器使用以太网电缆。
5。设置竞争Preautonomous模式通过选择开关禁用在左边的开关和选项自治选择正确的开关。
6。对V5控制器与烦恼V5机器人大脑通过执行上市的步骤在这里。
模型
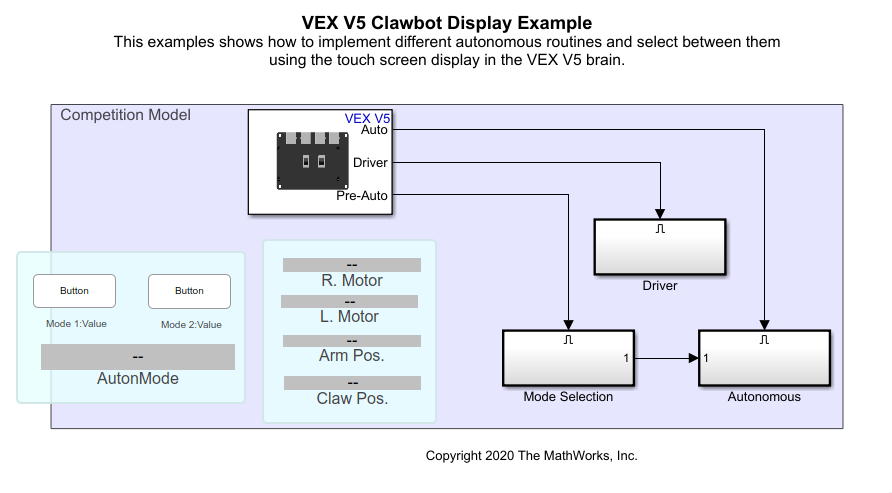
仿真软件万博1manbetx编码器支持万博1manbetx包烦恼EDR版本5的机器人的大脑提供了一个预配置模型,您可以使用它们来选择自治模式的烦恼V5机器人的大脑。
打开模型,在MATLAB®命令提示符运行以下命令:
open_system (“vexv5_Clawbot_Display_Demo”)
如果模型面板没万博1manbetx有呈现如图片所示在使用Windows®10系统,然后在Windows 10系统执行这些步骤:
1。选择开始>设置>系统>显示。
2。在规模和布局选项,设置改变文本的大小,应用程序,和其他物品到100%。
3所示。点击高级扩展设置。
4所示。集让窗户试着修复应用所以他们不模糊选项从。
步骤2:部署、运行和选择不同的自治模式在烦恼V5机器人的大脑
1。在硬件选项卡,在部署部分,单击构建、部署和启动按钮。这一行动构建,下载和模型作为一个独立的应用程序运行在烦恼V5机器人大脑装置。应用程序继续运行,即使设备断开电脑。应用程序的用户界面包含按钮和显示模块,显示在烦恼V5机器人的大脑。按钮块代表不同的自治模式,你可以选择。
2。的设备,观察显示屏上的读数。一个示例屏幕如下所示。
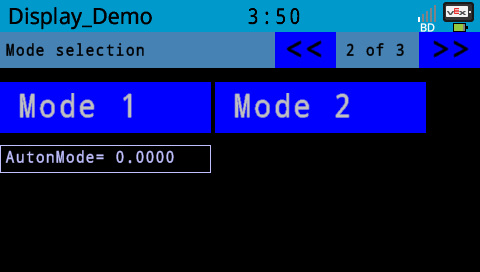
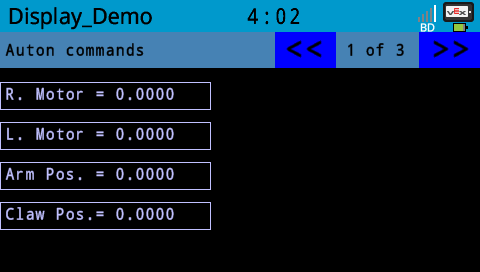
你可以按下箭头键在液晶触摸屏导航到所需的模型板。万博1manbetx显示模块显示的示例屏幕auton命令如下所示。
信息显示和按钮块添加到面板上,看到的为烦恼V5创造触摸屏控制和显示机器人的大脑。
在比赛中使用这个模型
这部分帮助您理解中使用的不同的子系统模型。这是有用的,如果你想使用这个模型的竞争。
模型有三个子系统即启用模式选择、司机和自治。子系统系统分解成简单小巧的组件。启用子系统允许您运行特定子系统基于某些条件。在这个例子中,竞争开关组允许您选择要运行的子系统。模式选择子系统运行期间preautonomous模式;司机和自治子系统执行期间司机和自治模式,分别。
Preautonomous模式:使用preautonomous模式执行一次性任务,比如选择一个好的自主轨迹,设置电机速度等等。在这个例子中,按钮在V5中显示机器人的大脑来帮助选择不同的自主轨迹(机器人转向左边或右边)。此外,选择自治模式是显示在屏幕上使用显示块从仪表板图书馆。更多地了解在V5机器人的大脑,创建用户界面为烦恼V5创造触摸屏控制和显示机器人的大脑。
司机子系统:使用驱动子系统程序的机器人driver-controlled时期。
独立的子系统:使用自动子系统项目与不同的自主机器人轨迹。此外,您还可以使用显示块从仪表板库来显示传感器值或其他诊断信息的烦恼V5机器人大脑的触摸屏。