multirotorgydF4y2Ba
多旋翼无人机制导模型gydF4y2Ba
描述gydF4y2Ba
一个gydF4y2BamultirotorgydF4y2Ba对象代表了无人机(UAV)的降阶制导模型。该模型近似于由自动驾驶仪控制器和多旋翼三维运动模型组成的闭环系统的行为。gydF4y2Ba
关于固定翼无人机,请参见gydF4y2BafixedwinggydF4y2Ba.gydF4y2Ba
创建gydF4y2Ba
型号=多转子gydF4y2Ba创建一个多转子运动模型gydF4y2Ba双gydF4y2Ba制导模型的输入、输出和配置参数的精度值。gydF4y2Ba
模型=多旋翼(数据类型)gydF4y2Ba指定数据类型精度(gydF4y2Ba数据类型gydF4y2Ba属性)用于引导模型的输入、输出和配置参数。gydF4y2Ba
属性gydF4y2Ba
对象的功能gydF4y2Ba
控制gydF4y2Ba |
无人机控制命令gydF4y2Ba |
导数gydF4y2Ba |
无人机状态的时间导数gydF4y2Ba |
环境gydF4y2Ba |
无人机环境输入gydF4y2Ba |
状态gydF4y2Ba |
无人机状态向量gydF4y2Ba |
例子gydF4y2Ba
模拟一个多旋翼控制命令gydF4y2Ba
方法的使用gydF4y2BamultirotorgydF4y2Ba该制导模型用于模拟无人机由于指令输入而引起的状态变化。gydF4y2Ba
创建多旋翼制导模型。gydF4y2Ba
型号=多旋翼;gydF4y2Ba
创建一个状态结构。在世界坐标中指定位置。gydF4y2Ba
S =状态(模型);S (1:3) = [3;2;1];gydF4y2Ba
指定一个控制命令,gydF4y2BaugydF4y2Ba,规定了多旋翼机的滚转和推力。gydF4y2Ba
U =控制(模型);u.Roll = pi/12;u.推力= 1;gydF4y2Ba
创建一个没有风的默认环境。gydF4y2Ba
E =环境(模型);gydF4y2Ba
给定当前状态、控制命令和环境,计算状态的时间导数。gydF4y2Ba
Sdot =导数(模型,s,u,e);gydF4y2Ba
模拟无人机状态使用gydF4y2Ba数值gydF4y2Ba集成。的gydF4y2BaygydF4y2Ba字段输出多旋翼无人机状态为13 ×gydF4y2BangydF4y2Ba矩阵。gydF4y2Ba
simOut =数值(@ (~,x)导数(模型、x u, e), [0 3], s);大小(simOut.y)gydF4y2Ba
ans =gydF4y2Ba1×2gydF4y2Ba3536年13gydF4y2Ba
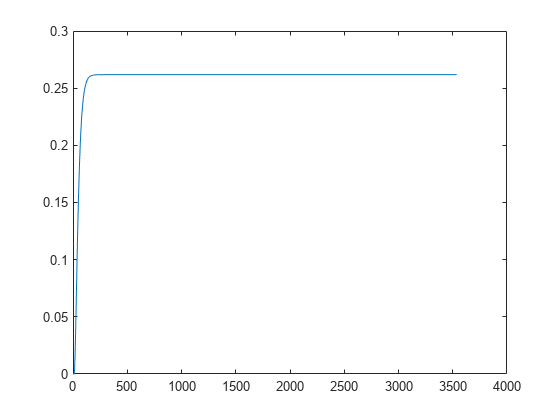
根据仿真输出绘制滚转角度变化图。滚动角(X欧拉角)是第9行gydF4y2BasimOut.ygydF4y2Ba输出。gydF4y2Ba
:情节(simOut.y(9日)gydF4y2Ba
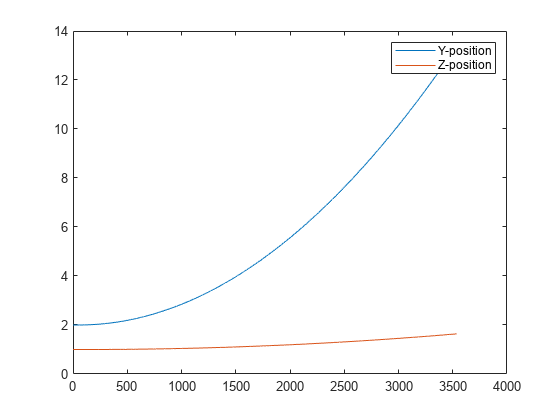
画出Y轴和Z轴位置的变化。在指定的推力和滚转角度下,多旋翼应该飞过并失去一些高度。Z的值为正值,因为Z是正的。gydF4y2Ba
:图绘制(simOut.y (2));持有gydF4y2Ba在gydF4y2Ba:情节(simOut.y (3));传奇(gydF4y2Ba“坐标”gydF4y2Ba,gydF4y2Ba“z位置”gydF4y2Ba)举行gydF4y2Ba从gydF4y2Ba
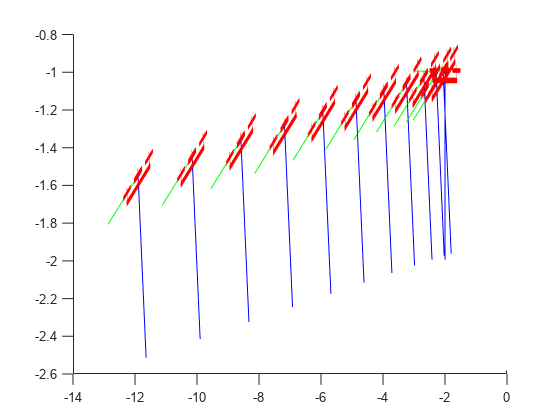
您还可以使用绘图多旋翼轨迹gydF4y2BaplotTransformsgydF4y2Ba.根据模拟状态创建平移和旋转向量。下采样(每300个元素)并转置gydF4y2BasimOutgydF4y2Ba元素,并将欧拉角转换为四元数。指定网格为gydF4y2Bamultirotor.stlgydF4y2Ba文件和正z方向为gydF4y2Ba“向下”gydF4y2Ba.所显示的视图显示无人机在y方向上平移并失去高度。gydF4y2Ba
translations = simOut.y(1:3,1:300:end)';gydF4y2Ba% xyz位置gydF4y2Ba= eul2quat(simOut.y(7:9,1:300:end)');gydF4y2Ba欧拉gydF4y2BaplotTransforms(平移、旋转、gydF4y2Ba...gydF4y2Ba“MeshFilePath”gydF4y2Ba,gydF4y2Ba“multirotor.stl”gydF4y2Ba,gydF4y2Ba“InertialZDirection”gydF4y2Ba,gydF4y2Ba“向下”gydF4y2Ba)视图([90.00 -0.60])gydF4y2Ba
更多关于gydF4y2Ba
无人机多旋翼制导模型方程gydF4y2Ba
对于多旋翼飞行器,用下列方程定义无人机的制导模型。要使用这些控制方程计算无人机状态的时间导数,请使用gydF4y2Ba导数gydF4y2Ba函数。使用以下命令指定输入gydF4y2Ba状态gydF4y2Ba,gydF4y2Ba控制gydF4y2Ba,gydF4y2Ba环境gydF4y2Ba.gydF4y2Ba
无人机在土框中的位置为[gydF4y2BaxgydF4y2BaegydF4y2Ba,gydF4y2BaygydF4y2BaegydF4y2Ba,gydF4y2BazgydF4y2BaegydF4y2Ba],方向为ZYX欧拉角,[gydF4y2BaψgydF4y2Ba,gydF4y2BaϴgydF4y2Ba,gydF4y2BaϕgydF4y2Ba以弧度表示。角速度为[gydF4y2BapgydF4y2Ba,gydF4y2Ba问gydF4y2Ba,gydF4y2BargydF4y2Ba]弧度每秒。gydF4y2Ba
无人机机体框架坐标为[gydF4y2BaxgydF4y2BabgydF4y2Ba,gydF4y2BaygydF4y2BabgydF4y2Ba,gydF4y2BazgydF4y2BabgydF4y2Ba].gydF4y2Ba
将矢量从主体坐标系旋转到世界坐标系的旋转矩阵为:gydF4y2Ba
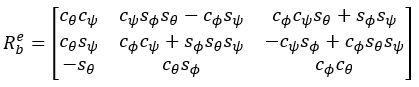
因为(gydF4y2BaxgydF4y2Ba)和罪(gydF4y2BaxgydF4y2Ba)的缩写为gydF4y2BacgydF4y2BaxgydF4y2Ba而且gydF4y2Ba年代gydF4y2BaxgydF4y2Ba.gydF4y2Ba
无人机质心在地球坐标下的加速度受以下约束:gydF4y2Ba
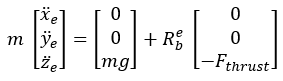
米gydF4y2Ba为无人机质量,gydF4y2BaggydF4y2Ba是重力,并且gydF4y2BaFgydF4y2Ba推力gydF4y2Ba是总力产生的螺旋桨应用到多旋翼沿-gydF4y2BazgydF4y2BabgydF4y2Ba轴(在水平姿势中指向上方)。gydF4y2Ba
采用两个独立的PD控制器控制两个转角,两个独立的P控制器控制偏航角速度和推力来近似闭环滚仰姿态控制器。角速度、角加速度和推力由以下因素决定:gydF4y2Ba

这个模型假设自动驾驶仪接收了命令滚转,俯仰,偏航率,gydF4y2Ba 总推力,gydF4y2BaFgydF4y2BacgydF4y2Ba推力gydF4y2Ba.生成用于指定这些输入的结构gydF4y2Ba
总推力,gydF4y2BaFgydF4y2BacgydF4y2Ba推力gydF4y2Ba.生成用于指定这些输入的结构gydF4y2Ba控制gydF4y2Ba.gydF4y2Ba
控制输入的P和D增益被指定为gydF4y2BaKPgydF4y2BaαgydF4y2Ba而且gydF4y2BaKDgydF4y2BaαgydF4y2Ba,在那里gydF4y2BaαgydF4y2Ba不是旋转角度就是推力。这些增益连同无人机质量,gydF4y2Ba米gydF4y2Ba中指定的gydF4y2Ba配置gydF4y2Ba的属性gydF4y2BamultirotorgydF4y2Ba对象。gydF4y2Ba
从这些控制方程中,模型给出了以下变量:gydF4y2Ba![]()
类的输出匹配这些变量gydF4y2Ba状态gydF4y2Ba函数。gydF4y2Ba
参考文献gydF4y2Ba
[1]梅林格,丹尼尔和内森·迈克尔。四旋翼飞行器精确攻击性机动的轨迹生成和控制gydF4y2Ba国际机器人研究杂志gydF4y2Ba.2012,第664-74页。gydF4y2Ba
扩展功能gydF4y2Ba
版本历史gydF4y2Ba
在R2018b中引入gydF4y2Ba
另请参阅gydF4y2Ba
功能gydF4y2Ba
数值gydF4y2Ba|gydF4y2Ba控制gydF4y2Ba|gydF4y2Ba导数gydF4y2Ba|gydF4y2Ba环境gydF4y2Ba|gydF4y2Ba状态gydF4y2Ba|gydF4y2BaplotTransformsgydF4y2Ba
对象gydF4y2Ba
块gydF4y2Ba
- 无人机制导模型gydF4y2Ba|gydF4y2Ba路标追随者gydF4y2Ba
主题gydF4y2Ba
您也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba