主要内容
路标追随者
跟踪无人机航路点
- 库:
无人机工具箱/算法
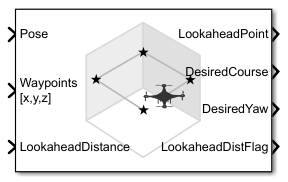
描述
的路标追随者块使用前瞻点跟踪无人机(UAV)的一组航路点。该模块计算给定一个无人机位置、一组航路点和一个前视距离的前视点、期望航向和期望偏航。指定一组路径点,并调整导航路径点的前视距离和过渡半径参数。该块支持多旋翼和固定万博1manbetx翼无人机类型。
港口
输入
输出
参数
更多关于
路标超平面条件
当跟随一组航路点时,根据无人机的位姿可以忽略第一个航路点。由于用于跟踪路径的前视距离的性质,航路点跟踪器使用过渡区域检查无人机是否靠近下一个航路点以过渡到下一个航路段。但是,也存在无人机在该区域之外发生转移的情况。在下一个航路点绘制一个三维超平面。如果无人机的姿态在这个超平面内,航路点跟随者将转换到下一个航路点。这种行为有助于确保无人机遵循可实现的路径。
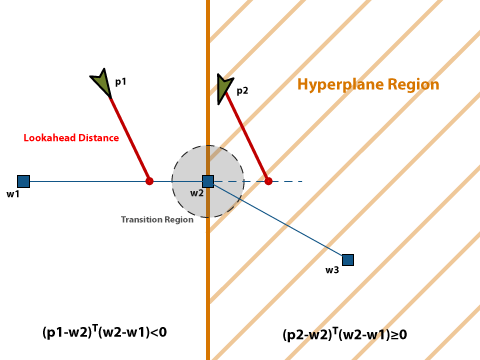
超平面条件满足:
(p-w1)T(w2-w1)≥0
p无人机的位置,和w1和w2是顺序的路径点位置。
如果你发现这种行为有局限性,可以考虑根据你的初始姿态添加更多的路径点,迫使追随者向你的初始路径点导航。
参考文献
[1] Park, Sanghyuk, John Deyst, Jonathan How。“用于轨迹跟踪的一种新的非线性制导逻辑”。AIAA制导,导航和控制会议和展览, 2004年。
扩展功能
另请参阅
块
功能
对象
介绍了R2018b
你也可以从以下列表中选择一个网站: