Double-Lane改变策略
这个参考应用代表了一个完整的车辆动力学模型,经历了根据标准ISO 3888-2的双车道变道机动[1].您可以创建自己的版本,建立一个框架,以测试您的车辆在正常和极端驾驶条件下满足设计要求。使用参考应用程序分析车辆的平顺性和操纵性,并开发底盘控制。执行车辆研究,包括偏航稳定性和横向加速度限制,使用这个参考应用程序。
ISO 3888 - 21定义了测试车辆避障性能的双车道变道机动。在测试中,驾驶员:
加速直到车辆达到目标速度
松开油门踏板
转向方向盘,沿着小路进入左车道
转动方向盘,沿着小路回到右车道
通常情况下,锥状物标记车道边界。如果车辆和驾驶员能够在不撞到圆锥体的情况下进行操纵,车辆就通过了测试。
为了测试高级驾驶员辅助系统(ADAS)和自动驾驶(AD)感知、规划和控制软件,您可以在3D环境中进行操作。有关3D可视化引擎平台的要求和硬件建议,请参见3D可视化引擎要求.
要创建并打开双线变道参考应用程序项目的工作副本,输入
该表总结了参考应用中的模块和子系统。一些子系统包含变体。
| 参考应用程序元素 | 描述 | 变体 |
|---|---|---|
变道参考发生器 |
为可视化子系统生成车道信号,为可视化子系统生成轨迹信号预测司机块 |
|
预测司机 |
生成规范化的转向、加速和制动命令,跟踪参考轨迹 |
|
环境 |
执行风力和地面力量 |
✓ |
控制器 |
实现发动机控制单元(ecu),变速箱和刹车控制器 |
✓ |
客运车辆 |
实现了:
|
✓ |
可视化 |
提供车辆轨迹、驾驶员响应和3D可视化 |
✓ |
控件上重写默认变量建模选项卡,设计部分,单击下拉菜单。在一般部分中,选择变体经理.在变体管理器中,导航到您想要使用的变体。右键单击并选择使用此选择覆盖.
变道参考发生器
使用变道参考发生器块生成:
可视化子系统的车道信号-左和右车道边界是一个函数车辆宽度参数。
预测驱动块的速度和横向参考信号-使用横向参考位置断点和横向参考数据参数指定横向参考轨迹作为纵向距离的函数。
要指定目标速度,请使用纵向进口速度设定值参数。
预测司机
引用应用程序使用预测司机块生成规范化的转向、加速和制动命令,跟踪参考轨迹。
的预测司机块实现了由C. C. MacAdam开发的最优单点预览(向前看)控制模型[2],[3],[4].该模型描述了路径跟随和避障机动中驾驶员的转向控制行为。驱动程序预览遵循一个预定义的路径。
环境
环境子系统产生风和地面力量。参考应用程序具有这些环境变体。
| 环境 | 变体 | 描述 |
|---|---|---|
地面反馈 |
|
使用车辆地形传感器块在三维环境中实现射线跟踪 |
|
实现恒定摩擦值 |
控制器
控制器子系统产生发动机扭矩、传动齿轮和刹车命令。参考应用程序有这些制动变体。
| 控制器 | 变体 | 描述 |
|---|---|---|
制动压力控制 |
|
在两种状态之间切换的防抱死制动系统(ABS)反馈控制器 |
|
开环制动控制器 |
客运车辆
乘用车子系统有一个引擎、控制器和一个带有四个轮子的车身。具体来说,飞行器包含这些子系统。
| 车身,悬架,车轮子系统 | 变体 | 描述 |
|---|---|---|
PassVeh7DOF |
|
四轮车辆:
|
PassVeh14DOF |
|
有四个轮子的车辆。
|
| 引擎子系统 | 变体 | 描述 |
|---|---|---|
映射引擎 |
|
映射的火花点火(SI)发动机 |
转向,传动,传动系统,和刹车子系统 |
变体 | 描述 | |
|---|---|---|---|
传动系统理想的固定齿轮 |
动力传动系统模型 |
全轮驱动 |
配置传动系统为全轮、前轮或后轮驱动 说明扭矩联轴器的类型 |
|
|||
|
|||
传输 |
|
理想固定齿轮传动 |
|
可视化
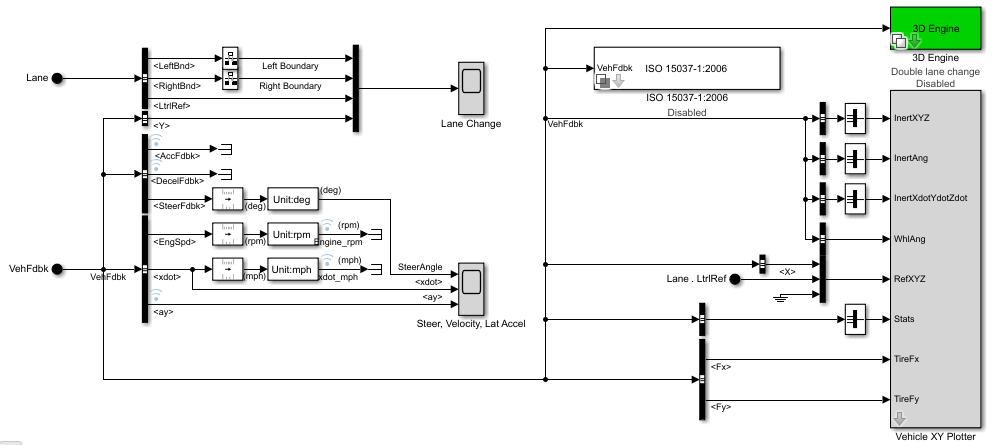
当您运行模拟时,可视化子系统将提供驾驶员、车辆和响应信息。参考应用程序记录机动过程中的车辆信号,包括转向、车辆和发动机速度,以及侧向加速度。您可以使用仿真数据检查器来导入记录的信号并检查数据。
| 元素 | 描述 |
|---|---|
司机命令 |
司机命令:
|
车辆响应 |
汽车反应:
|
车道改变范围块 |
车辆横向位移与时间:
|
引导vs啊范围块 |
转向角度与横向加速度 |
转向,速度,加速度范围块 |
|
车辆XY绘图仪 |
车辆纵向与横向距离 |
ISO 15037 - 1:2006块 |
在仿真数据检查器中显示ISO标准测量信号,包括方向盘角度和扭矩,纵向和横向速度,侧滑角 |
三维可视化
您还可以选择启用或禁用3D可视化环境。有关3D可视化引擎平台的要求和硬件建议,请参见3D可视化引擎要求.在打开参考应用程序之后,在可视化子系统中,打开3 d引擎块。设置这些参数。
3 d引擎来启用.
场景例如,对其中一个场景
直路.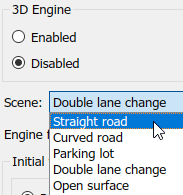
在场景中定位车辆:
选择位置初始化方法:
建议现场-将初始车辆位置设置为场景中推荐的值
用户指定的-设定自己的初始位置
选择应用修改初始车辆位置参数。
点击使用初始值更新模型工作区使用应用的值覆盖模型工作区中车辆的初始位置。

当你运行模拟时,查看车辆的响应AutoVrtlEnv窗口。
请注意
打开和关闭
AutoVrtlEnv窗口,使用Simulink万博1manbetx®运行和停止按钮。如果手动关闭AutoVrtlEnv窗口时,Simu万博1manbetxlink将以错误停止模拟。当启用3D可视化环境时,不能将模拟后退。
要更改摄像机视图,请使用以下关键命令。
| 关键 | 相机视图 | |
|---|---|---|
1 |
左后 |
|
2 |
回来 |
|
3. |
回到正确的 |
|
4 |
左 |
|
5 |
内部 |
|
6 |
正确的 |
|
7 |
前左 |
|
8 |
前面 |
|
9 |
前右 |
|
0 |
开销 |
|

参考文献
[1] iso 3888-2: 2011。乘用车。对严重变道操纵进行赛道测试.
[2] MacAdam, C. C.“线性系统的最优预览控制”。动态系统,测量和控制学报.1980年第102卷第3期。
[3] MacAdam, C. C.“最优预瞄控制在汽车闭环驾驶仿真中的应用”。IEEE系统、人与控制论汇刊.第11卷第6期,1981年。
[4] MacAdam, C. C.“用于动态分析的驾驶员/车辆转向交互模型的开发”。最终技术报告UMTRI-88-53.密歇根大学交通研究所,1988。
另请参阅
相关的例子
更多关于
你也可以从以下列表中选择一个网站: