bundleAdjustment
优化相机姿态和3d点
语法
描述
(返回精确的3-D点和相机姿态,以减少重投影误差。改进过程是Levenberg-Marquardt算法的一种变体。3-D点和相机姿态被放置在同一个全局参考坐标系中。xyzRefinedPoints,refinedPoses) = bundleAdjustment (xyzPoints,pointTracks,cameraPoses,intrinsic)
(___,此外返回一个N-元素向量,包含使用前面语法的参数对每个三维世界点的平均重投影误差。reprojectionErrors) = bundleAdjustment (___)
(___) = bundleAdjustment (___,使用由一个或多个指定的附加选项名称,值)名称,值对参数。未指定的属性具有默认值。
例子
完善相机姿态和3d点从一个单一的相机
加载数据进行初始化。
data =负载(“sfmGlobe”);
完善相机的姿态和点。
[xyzRefinedPoints, refinedPoses] =…bundleAdjustment (data.xyzPoints data.pointTracks、data.cameraPoses data.intrinsics);
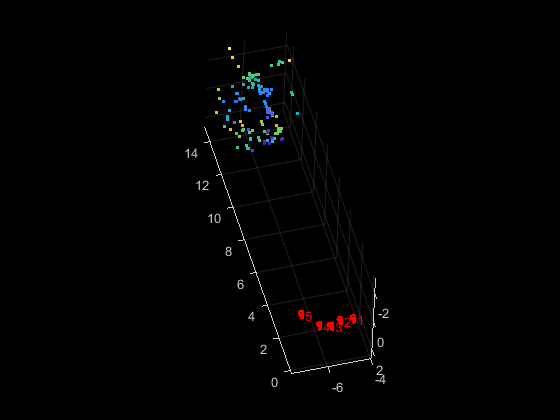
显示精致的相机姿态和3d世界点。
pcshow (xyzRefinedPoints“VerticalAxis”,“y”,“VerticalAxisDir”,…“下来”,“MarkerSize”, 45岁);持有在plotCamera (refinedPoses“大小”, 0.1);持有从网格在
输入参数
输出参数
xyzRefinedPoints-精制世界点的三维位置
米3矩阵
3-D位置的精制世界点,返回作为一个米的-乘3矩阵[x,y,z)的位置。
数据类型:单|双
refinedPoses-精制相机姿势
三列的表
精致的相机姿势,返回作为一张桌子。表中包含三个列“ViewId”,“定位”,“位置”。
reprojectionErrors——Reprojection错误
米1的向量
重投影错误,作为米1的向量。该功能将每个世界点投影回每个相机。然后在每幅图像中,函数计算重投影误差作为被检测点与重投影点之间的距离。的reprojectionErrors向量包含每个世界点的平均重投影误差。

参考文献
[1] Lourakis, m.i.a.和A.A. Argyros。SBA:用于一般稀疏束调整的软件包。关于数学软件的ACM交易。2009.
[2] Hartley, R.和A. Zisserman。计算机视觉中的多视图几何。剑桥大学出版社,2003年。
[3] Triggs, B., P. McLauchlan, R. Hartley, A. Fitzgibbon。“束调整:一个现代的综合。”视觉算法国际研讨会论文集。斯普林格出版社。1999年,页298 - 372。
另请参阅
功能
对象
介绍了R2016a
您也可以从以下列表中选择一个网站:
