主要内容
pcviewset
管理基于点云的视觉里程计和SLAM的数据
描述
的pcviewset对象存储点云里程计和同时定位和映射(SLAM)数据作为一组视图和视图之间的成对连接。
属性
对象的功能
addView |
向视图集添加视图 |
updateView |
更新视图集中的视图 |
deleteView |
从视图集中删除视图 |
hasView |
检查视图是否在视图集中 |
addConnection |
在视图集中添加视图之间的连接 |
updateConnection |
更新视图集中视图之间的连接 |
deleteConnection |
删除视图集中视图之间的连接 |
hasConnection |
检查两个视图之间的连接是否在视图集中 |
findView |
查找与视图标识符关联的视图 |
findConnection |
查找与视图标识符相关联的连接 |
connectedViews |
视图集中的连接视图 |
提出了 |
与视图集中的视图相关联的绝对姿势 |
createPoseGraph |
创建构成图 |
optimizePoses |
使用相对位姿约束优化绝对位姿 |
情节 |
图视图集视图和连接 |
例子
使用点云配准执行激光雷达里程计
创建一个视图集来保存里程数。
vSet = pcviewset;
创建一个Velodyne阅读器来读取点云。
veloReader = velodyneFileReader (“lidarData_ConstructionRoad.pcap”,“HDL32E”);ptCloud = readFrame (veloReader);
预处理一帧,去除地平面,下采样点云。
elevationDelta = 25;gridStep = 0.2;groundPtsIdx = segmentGroundFromLidarData (ptCloud,...“ElevationAngleDelta”, elevationDelta);ptCloud = select(ptCloud, ~groundPtsIdx,“输出”,“全部”);ptCloud = pcdownsample (ptCloud,“gridAverage”, gridStep);
初始化第一个视图的属性。
absPose = rigid3d;relPose = rigid3d;
将第一个视图添加到点云视图集。
absPose vSet = addView (vSet, 1日,“PointCloud”, ptCloud);
使用第一个视图初始化一个点云图。
ptCloudMap = (ptCloud)复印件;skipFrames = 5;prevViewId = 1;prevPtCloud = ptCloud;
循环遍历帧以更新里程计和点云图。
为viewId = 6: skipFrames: 50%读点云。ptCloud = readFrame (veloReader viewId);%进行预处理。groundPtsIdx = segmentGroundFromLidarData (ptCloud,...“ElevationAngleDelta”, elevationDelta);ptCloud = select(ptCloud, ~groundPtsIdx,“输出”,“全部”);ptCloud = pcdownsample (ptCloud,“gridAverage”, gridStep);%注册新的点云对上一个。regGridStep = 5;relPose = pcregisterndt(ptCloud, prevPtCloud, regGridStep,...“InitialTransform”, relPose);更新绝对转换。absPose = rigid3d(relPose.T*absPose;T);添加新的视图和连接到前一个视图。vSet = addView (vSet viewId absPose,“PointCloud”, ptCloud);vSet = addConnection (vSet prevViewId、viewId relPose);prevPtCloud = ptCloud;prevViewId = viewId;结束
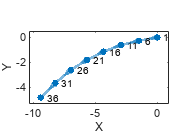
在默认的2d视图中显示视图设置。
情节(vSet“ShowViewIds”,“上”)视图(2)
介绍了R2020a
你也可以从以下列表中选择一个网站:
