vision.PeopleDetector
使用猪的特征检测直立的人
描述
人检测器对象使用直方图的方向梯度(HOG)特征和训练好的支持向量机(SVM)分类器在输入图像中检测人。万博1manbetx这个物体可以检测处于直立位置的人。
检测图像中的人物:
创建
vision.PeopleDetector对象并设置其属性。调用对象的参数,就好像它是一个函数。
有关系统对象如何工作的更多信息,请参见什么是系统对象?(MATLAB)。
创建
语法
描述
peopleDetector= vision.PeopleDetectorpeopleDetector,它在视频中跟踪一组点。
peopleDetector= vision.PeopleDetector (模型)ClassificationModel财产模型。
peopleDetector= vision.PeopleDetector (名称,值)peopleDetector = vision.PeopleDetector(“ClassificationModel”、“UprightPeople_128x64”)
属性
使用
语法
描述
输入参数
输出参数
对象的功能
使用对象函数,指定系统对象™作为第一个输入参数。例如,为了释放一个名为System对象的系统资源obj,请使用以下语法:
发行版(obj)
例子
检测人
创建一个人员检测器并加载输入图像。
peopleDetector = vision.PeopleDetector;我= imread (“visionteam1.jpg”);
使用人员检测器对象检测人员。
[bboxes,分数]= peopleDetector(我);
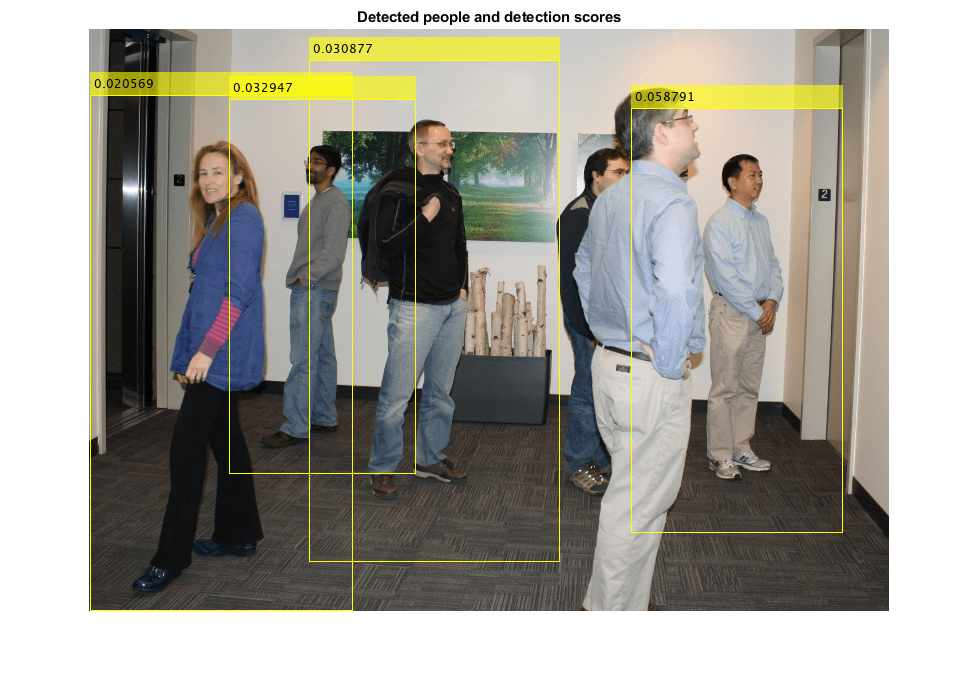
注释中发现的人。
我= insertObjectAnnotation (,“矩形”bboxes,分数);图中,imshow (I)标题(“检测到的人与检测分数”);
参考
达拉尔,N.和B.触发。“用于人类检测的定向梯度直方图,”IEEE计算机视觉和模式识别会议论文集, 2005年6月,第886-893页。
扩展功能
介绍了R2012b
您也可以从以下列表中选择一个网站:
