对象检测
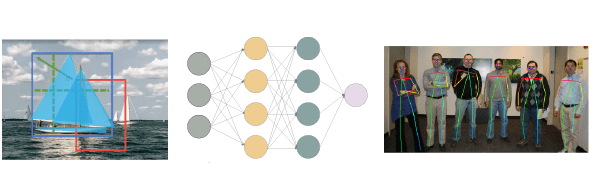
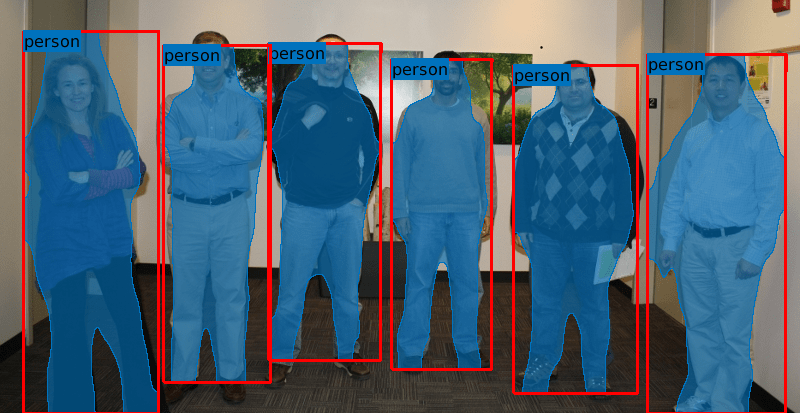
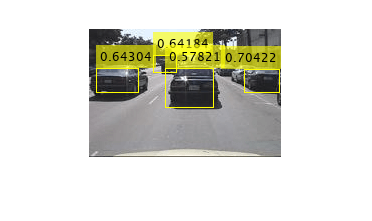
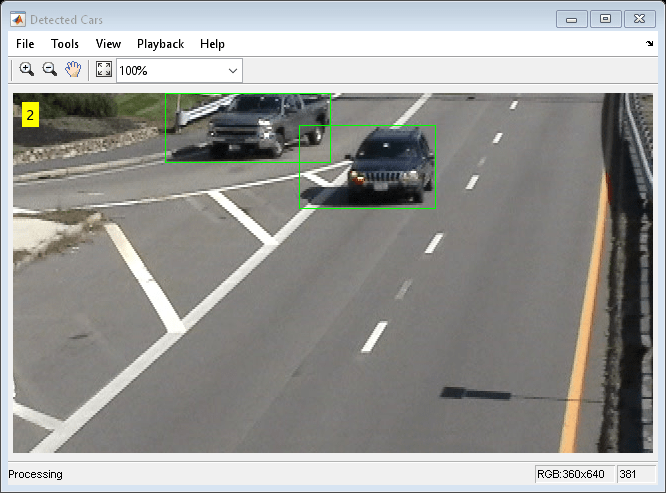
目标检测是一种用于定位图像或视频中物体实例的计算机视觉技术。对象检测算法通常利用机器学习或深度学习产生有意义的结果。当观看图像或视频时,人类可以在瞬间识别和定位感兴趣的对象。目标检测的目标是使用计算机复制这种智能。目标检测的最佳方法取决于您的应用程序和您试图解决的问题。
深度学习技术需要大量的标记训练图像,因此建议使用GPU来减少训练模型所需的时间。基于深度学习的目标检测方法使用卷积神经网络(cnn或ConvNets),如R-CNN和YOLO v2,或使用单镜头检测(SSD)。您可以训练自定义的对象检测器,或利用预先训练的对象检测器迁移学习,这种方法使您能够从预先训练好的网络开始,然后针对您的应用程序对其进行微调。卷积神经网络需要深度学习工具箱™。CUDA支持训练和预测万博1manbetx®-有能力的GPU。建议使用GPU,并且需要并行计算工具箱™. 有关详细信息,请参阅计算机视觉工具箱首选项和MathWorks产品中的并行计算支持万博1manbetxs manbetx 845(并行计算工具箱).
用于目标检测的机器学习技术包括聚合通道特征(ACF)、使用方向梯度直方图(HOG)特征的支持向量机(SVM)分类以及用于人脸或上身检测的Viola-Jones算法。您可以选择从预训练万博1manbetx对象检测器开始,或创建自定义对象检测器以适合您的应用程序。
功能
主题
开始
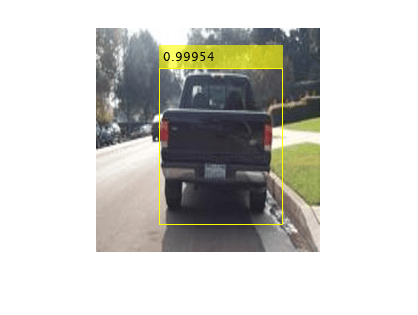
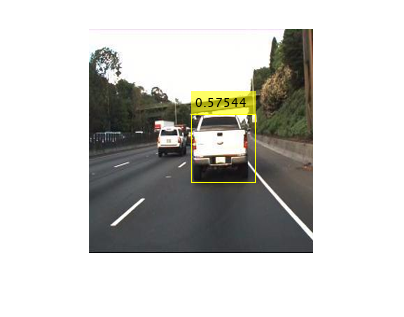
利用深度学习神经网络进行目标检测。
为几种类型的特性选择返回和接受点对象的函数
指定像素索引、空间坐标和三维坐标系
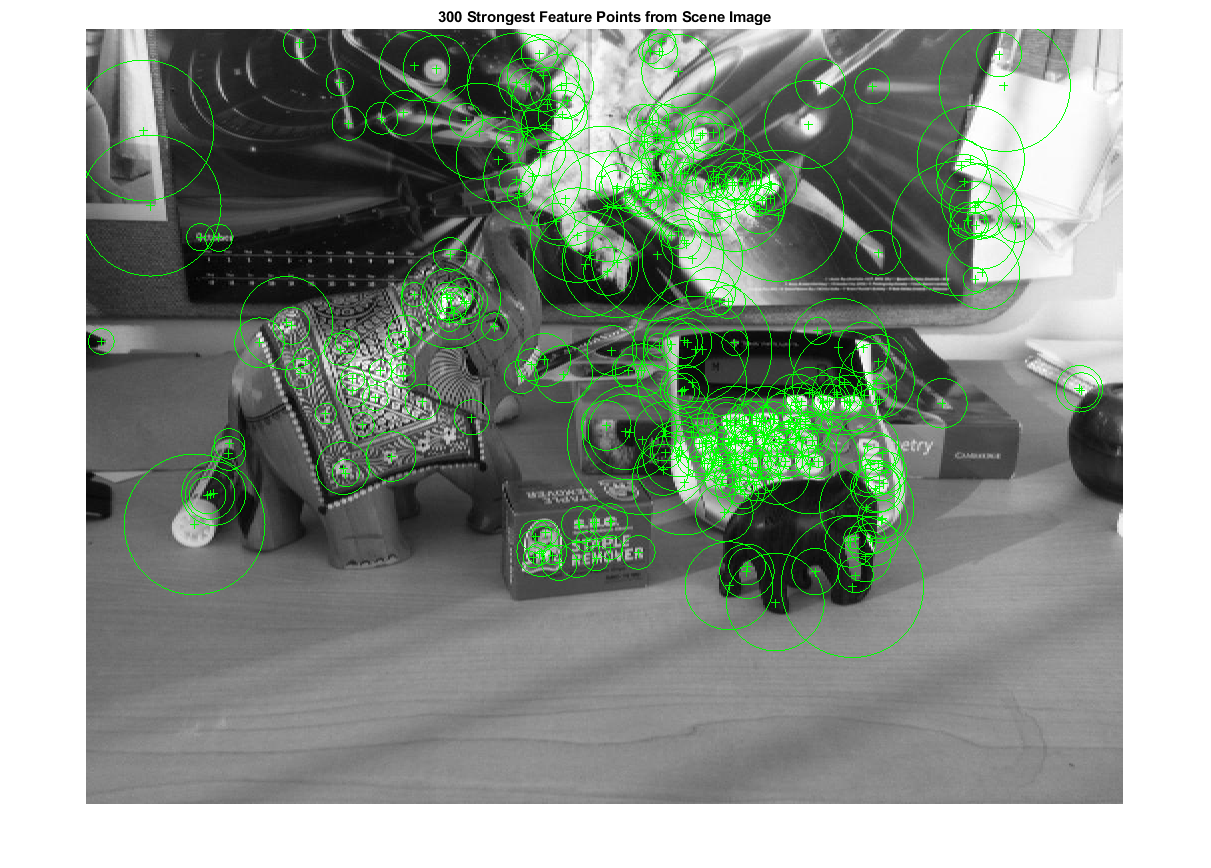
学习局部特征检测和提取的好处和应用
使用计算机视觉工具箱™功能,通过创建一个视觉词汇袋来进行图像类别分类。
训练自定义分类器
比较可视化功能。
目标检测和语义分割的训练数据
交互式标记矩形roi用于目标检测,像素用于语义分割,多边形用于实例分割,场景用于图像分类。
以交互方式标记用于对象检测的矩形ROI、用于语义分割的像素、用于实例分割的多边形以及用于视频或图像序列中图像分类的场景。
用于深度学习的数据存储(深度学习工具箱)
学习如何在深度学习应用程序中使用数据存储。
使用Mask R-CNN和深度学习执行多类实例分割。
使用创建用于对象检测或语义分割的训练数据图片标志或贴标签机视频.
开始深度学习
深度网络设计器(深度学习工具箱)
深度学习层列表(深度学习工具箱)
发现MATLAB中所有的深度学习层®.
MATLAB中的深度学习(深度学习工具箱)
使用卷积神经网络进行分类和回归,包括预训练网络和转移学习,以及GPU、CPU、群集和云上的培训,在MATLAB中发现深度学习能力。
预先训练的深度神经网络(深度学习工具箱)
了解如何下载并使用预训练卷积神经网络进行分类、转移学习和特征提取。
特色的例子




你也可以从以下列表中选择一个网站:
