matchfeatures.
查找匹配功能
语法
描述
indexPairs= matchfeatures(features1,features2)binaryFeatures对象或矩阵。
[也返回匹配特性之间的距离,索引为indexPairs,mationmetric.] = matchFeatures(features1,features2)indexPairs.
[包括由一个或多个指定的附加选项indexPairs,mationmetric.] = matchFeatures(features1,features2,名称,值)名称,值对论点。
例子
在一对图像之间查找相应的兴趣点
在使用本地邻居和Harris算法之间查找一对图像之间的相应兴趣点。
阅读立体图像。
I1 = im2gray (imread ('viprection_deskleft.png'));i2 = im2gray(imread(“viprectification_deskRight.png”));
找到角落。
要点1 =探测器(I1);要点2 =探测法(I2);
提取邻域功能。
[特征1,有效_Points1] =提取物(I1,Points1);[特征2,有效_Points2] =提取物(I2,Point2);
匹配功能。
indexPairs = matchFeatures (features1 features2);
检索每个图像对应点的位置。
matchedpoints1 = viply_points1(indexPairs(:,1),:);matchedpoints2 =有效_points2(IndexPairs(:,2),:);
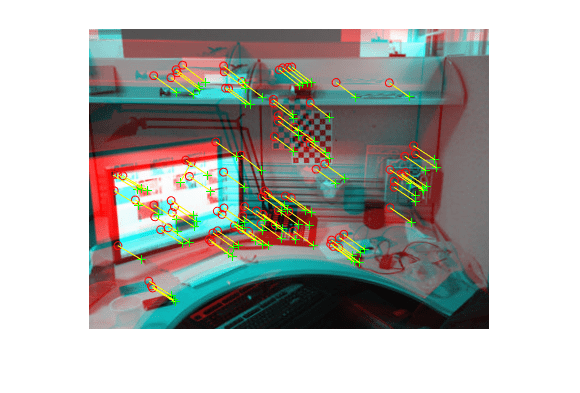
可视化相应的点。尽管有几个错误的匹配,您可以看到两个图像之间的翻译效果。
图;showMatchedFeatures (I1、I2 matchedPoints1 matchedPoints2);
使用Surf功能查找相应的点
利用SURF局部特征检测函数,找到两幅相互旋转和缩放的图像之间的对应点。
阅读两个图像。
I1 = imread ('cameraman.tif');I2 = imresize (imrotate (I1, -20), 1.2);
找到冲浪功能。
里= detectSURFFeatures (I1);points2 = detectSURFFeatures (I2);
提取特征。
[F1,VPTS1] =提取物(I1,点1);[F2,VPTS2] =提取物(I2,点2);
检索匹配点的位置。
IndexPairs = MatchFeatures(F1,F2);matchedpoints1 = VPTS1(IndexPairs(:,1));matchedpoints2 = VPTS2(IndexPairs(:,2));
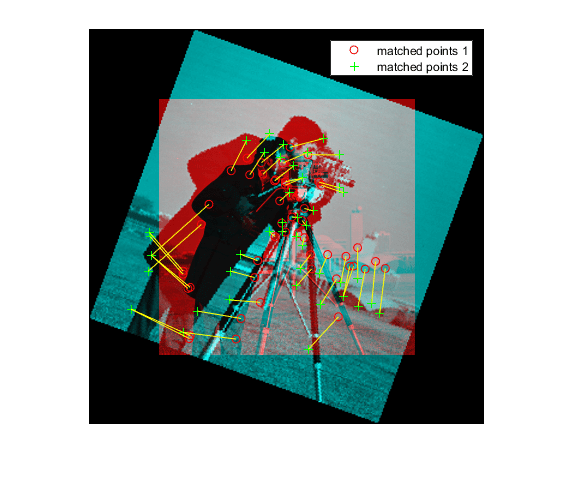
显示匹配点。数据仍然包括几个异常值,但您可以看到旋转和缩放在匹配特征显示上的效果。
图;showMatchedFeatures (I1、I2 matchedPoints1 matchedPoints2);传奇(“匹配点1”,的匹配点2);
输入参数
features1- - - - - -特性集1
binaryFeatures对象|米1-经过-N矩阵
功能集1,指定为abinaryFeatures对象或An.米1-经过-N矩阵。矩阵包含了米1特性,N对应于每个特征向量的长度。你可以获得binaryFeatures对象使用提取物质功能与快速视网膜关键点(FREAK),面向fast和旋转简要(ORB),或二进制鲁棒不变可扩展关键点(轻快)描述符方法。
features2- - - - - -特性集2
米2-经过-N矩阵|binaryFeatures对象
特点设置2,指定为abinaryFeatures对象或An.米2-经过-N矩阵。矩阵包含了米2功能和N对应于每个特征向量的长度。你可以获得binaryFeatures对象使用提取物质功能与快速视网膜关键点(FREAK),面向fast和旋转简要(ORB),或二进制鲁棒不变可扩展关键点(轻快)描述符方法。
名称-值对的观点
指定可选的逗号分隔的对名称,值论点。姓名参数名和价值是相应的价值。姓名必须出现在引号内。可以以任意顺序指定多个名称和值对参数name1,value1,...,namen,valuen.
“指标”,固态硬盘的指定特征匹配度量的平方差的和。
'方法'- - - - - -匹配方法
'彻底的'(默认)|'近似'
匹配方法,指定为逗号分隔的配对组成方法”,要么'彻底的'或者'近似'.该方法指定邻居之间的最近邻居features1和features2被发现。当它们之间的距离小于由此设置的阈值时,两个特征向量匹配MatchThreshold范围。
'彻底的' |
计算中特征向量之间的成对距离 |
'近似' |
使用一个有效的近似最近邻搜索。对于大的特性集使用这种方法。[3] |
'matchthreshold'- - - - - -匹配门槛
10.0或者1.0(默认)|范围内的百分比(0,100]
匹配阈值,指定为逗号分隔对,由'MatchThreshold'和标量百分比范围(0,100]。默认值设置为10.0对于二进制特征向量或1.0对于非加入特征向量。您可以使用匹配阈值来选择最强的匹配。阈值表示与完美匹配的距离的百分比。
当它们之间的距离小于设置的阈值时,两个特征向量匹配MatchThreshold.当特征之间的距离大于值时,该功能拒绝匹配MatchThreshold.增加值以返回更多匹配项。
输入的输入binaryFeatures对象通常需要更大的匹配阈值。的提取物质函数返回binaryFeatures提取句柄时,ORB或快速描述符。
'maxratio'- - - - - -比率阈值
0.6(默认)|比值范围(0,1)
比率阈值,指定为逗号分隔对,由'Maxratio.'和范围(0,1)内的标量比率值。使用最大比率来拒绝不明确的匹配。增加此值以返回更多匹配项。
“指标”- - - - - -特征匹配度量
固态硬盘的(默认)|“伤心”
特征匹配度量标准,指定为逗号分隔对组成度规”,要么“伤心”或者固态硬盘的.
“伤心” |
绝对差和 |
固态硬盘的 |
差平方和 |
此属性适用于以下情况:features1和features2,不binaryFeatures对象。指定功能时binaryFeatures对象,该函数使用汉明距离来计算相似度量。
输出参数
mationmetric.—匹配特征之间的距离
p1的向量
匹配功能之间的距离,作为a返回p-by-1矢量。距离的值基于所选的度量。每个我inmationmetric.对应于我在里面indexPairs输出矩阵。当度规被设置为伤心或者SSD.,特征向量在计算之前被归一化到单元向量。
请注意
你不能选择汉明指标。当它被自动调用时features1和features2输入binaryFeatures.
参考
[1] Lowe,David G.“来自Scale-Invariant Keypoints的独特图像特征。”国际计算机愿景.第60卷,第2页,第91-110页。
Muja M.和D. G. Lowe。二值特征的快速匹配。计算机和机器人愿景会议.CRV,2012年。
Muja M.和D. G. Lowe。"具有自动算法配置的快速近似最近邻"计算机视觉理论与应用国际会议.Visapp,2009。
Rublee, E., V. Rabaud, K. Konolige和G. Bradski。ORB: SIFT或SURF的有效替代品。在2011年国际计算机愿景会议的诉讼程序, 2564 - 2571。2011年西班牙巴塞罗那。
扩展能力
另请参阅
binaryFeatures|检察机构|检测到空间|detectHarrisFeatures|侦探训练|detectMSERFeatures|DetectorBfeatures.|detectSURFFeatures|estismsfundamentalmatrix.|estimateGeometricTransform|提取物质|ShowMatchedFeatures.
主题
你也可以从以下列表中选择一个网站:
