主要内容
视觉同步定位与绘图(vSLAM)
Visual Slam映射初始化,跟踪,本地映射,环路检测和漂移校正
视觉同步定位与测绘(Visual simultaneous localization and mapping, vSLAM)是指在同时测绘环境的同时,计算相机相对于其周围环境的位置和方向的过程。这个过程只使用摄像机的视觉输入。视觉SLAM的应用包括增强现实、机器人技术和自动驾驶。有关详细信息,请参见在Matlab中实现Visual Slam.
功能
主题
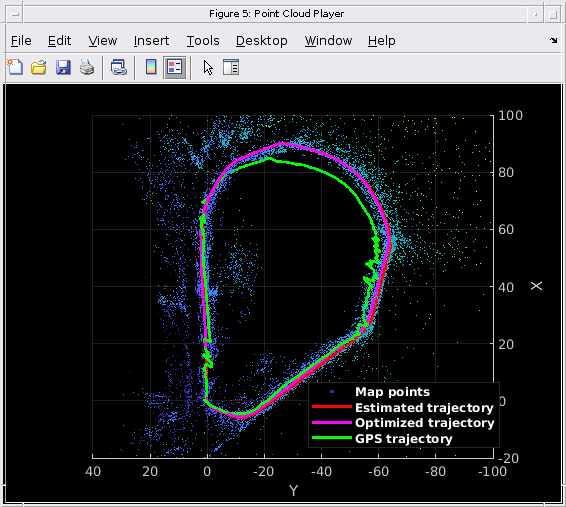
处理来自立体相机的图像数据,建立一个户外环境的地图,并估计相机的轨迹。
开发一个视觉定位系统使用合成图像数据从虚幻引擎®模拟环境。
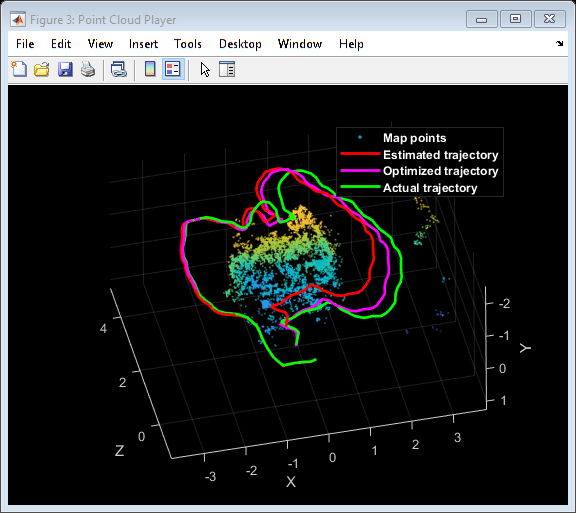
为配备立体相机的无人机开发一种视觉SLAM算法。
开发视觉SLAM算法使用虚幻引擎仿真(自动驾驶工具箱)
开发一个视觉同步定位和地图(SLAM)算法使用图像数据从虚幻引擎®仿真环境。
了解可视化同步定位与绘图(vSLAM)工作流程,以及如何使用MATLAB实现。
选择正确的同步定位和映射(SLAM)工作流并查找主题、示例和支持的特性。万博1manbetx
特色的例子
你也可以从以下列表中选择一个网站:
