主要内容
estimateWorldCameraPose
从3-D到2-D的点对应估计相机的姿态
语法
描述
[返回在世界坐标系中校准的摄像机的方向和位置。输入worldOrientation,worldLocation) = estimateWorldCameraPose (imagePoints,worldPoints,cameraParams)worldPoints必须在世界坐标系中定义。
这个函数解决了透视-n使用透视-三点(P3P)算法求解-点(PnP)问题[1].该函数还使用m估计样本一致性(MSAC)算法消除了虚假的通信。
[___,除了前面语法中的参数外,还返回用于计算摄像机姿态的嵌套函数的索引。inlierIdx) = estimateWorldCameraPose (imagePoints,worldPoints,cameraParams)
[___,另外,返回一个状态代码以指示是否有足够的点数。状态) = estimateWorldCameraPose (imagePoints,worldPoints,cameraParams)
[___) = estimateWorldCameraPose (___,使用一个或多个指定的附加选项名称,值)名称,值使用前面的任何语法对参数进行配对。
例子
从世界到图像的对应关系中确定相机的姿态
加载先前计算的世界到图像的对应。
data =负载(“worldToImageCorrespondences.mat”);
估计世界摄像机的姿势。
[worldOrientation, worldLocation] = estimateWorldCameraPose (...data.imagePoints、data.worldPoints data.cameraParams);
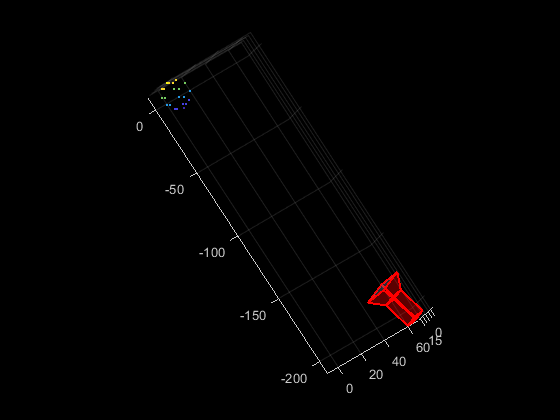
画出世界点。
pcshow (data.worldPoints“VerticalAxis”,“Y”,“VerticalAxisDir”,“下来”,...“MarkerSize”, 30);持有在plotCamera (“大小”10“定位”worldOrientation,“位置”,...worldLocation);持有从
输入参数
输出参数
参考文献
[1]高,X.-S。, X.-R。侯建华,唐俊杰,程慧芳。《透视-三点问题的完整解决方案分类》模式分析与机器智能学报。第25卷第8期930-943页,2003年8月。
Torr, P. H. S.和A. Zisserman。“MLESAC:一种新的用于估计图像几何的鲁棒估计器”。计算机视觉与图像理解。78卷,第1期,2000年4月,138-156页。
扩展功能
另请参阅
功能
bundleAdjustment|cameraPoseToExtrinsics|外在|extrinsicsToCameraPose|pcshow|plotCamera|pointsToWorld|relativeCameraPose|triangulateMultiview|viewSet|worldToImage
主题
介绍了R2016b
你也可以从以下列表中选择一个网站:
