文档帮助中心文档
立体视觉是通过比较同一场景的两个或多个视图,从相机图像中恢复深度的过程。来自运动的结构(SfM)是从一组二维图像中估计场景的三维结构的过程。视觉同步定位和测绘(vSLAM)是在同时测绘环境的同时,计算相机相对于其周围环境的位置和方向的过程。有关详细信息,请参见视觉大满贯概述和运动结构概述.
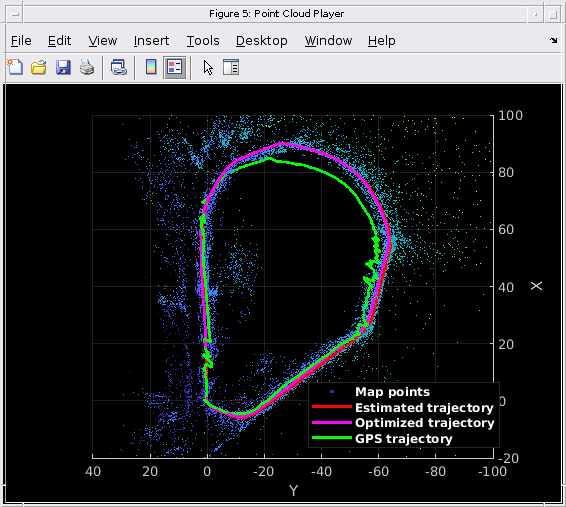
视觉同步定位与测绘(Visual simultaneous localization and mapping, vSLAM),是指在同时测绘环境的同时,计算相机相对于其周围环境的位置和方向的过程。这个过程只使用摄像机的视觉输入。vSLAM的应用包括增强现实、机器人技术和自动驾驶。
视觉同步定位和绘图(vSLAM)。
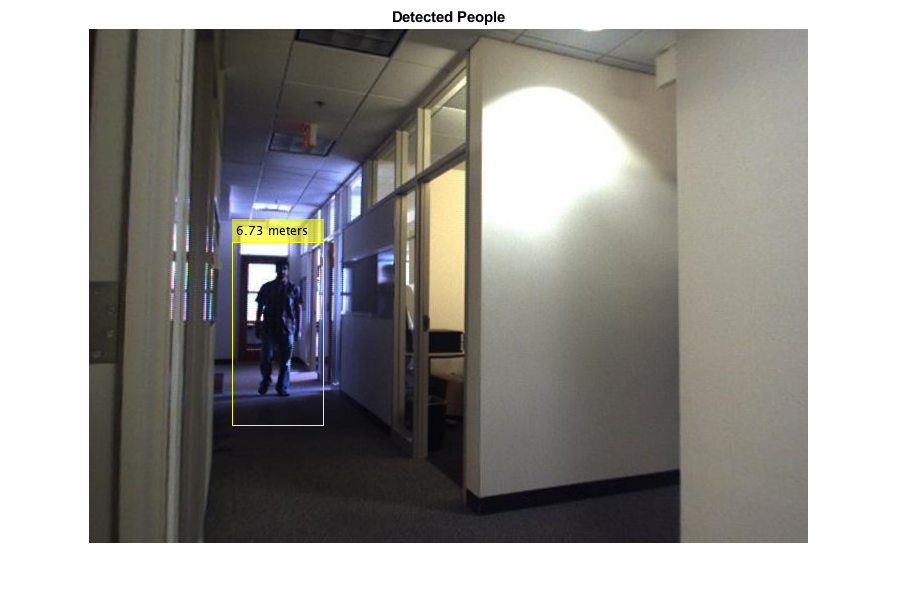
用校准过的立体相机在视频中检测人,并确定他们与相机的距离。
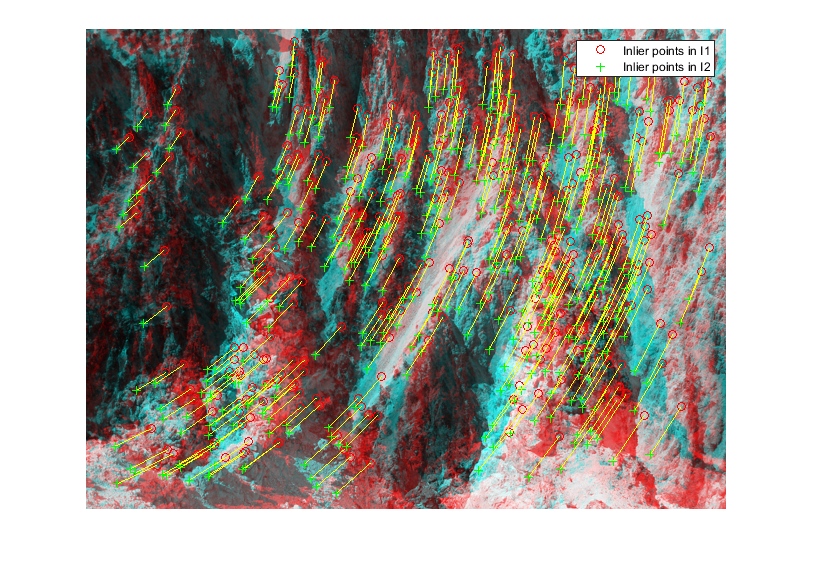
使用estimateFundamentalMatrix,estimateUncalibratedRectification,detectSURFFeatures函数计算校正的两个未校准的图像,相机的本质是未知的。
estimateFundamentalMatrix
estimateUncalibratedRectification
detectSURFFeatures
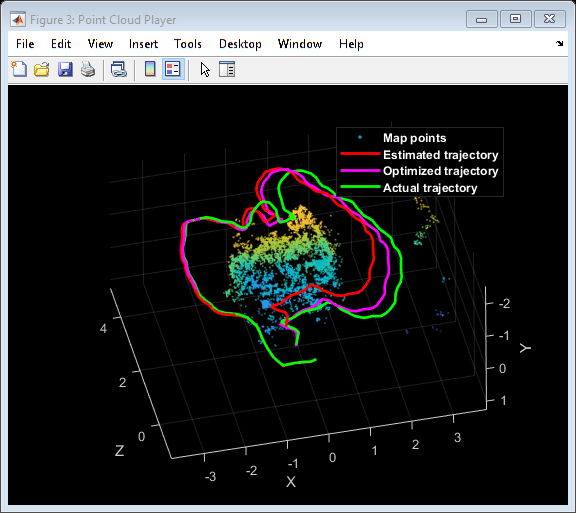
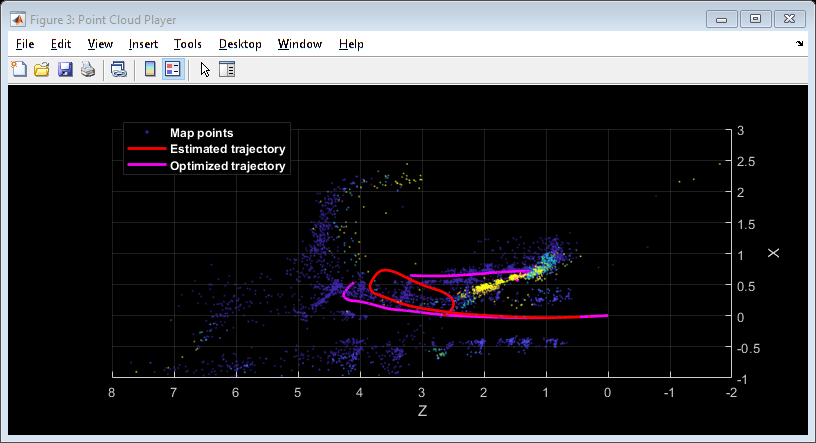
开发一个视觉同步定位和地图(SLAM)算法,使用从虚幻引擎®模拟环境获得的图像数据。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。万博1manbetx
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系