估计估计
校准单个或立体相机
语法
描述
[返回Cameraparams.,imagesUsed,估计识别) = estimateCameraParameters (imagePoints,世界观点)Cameraparams.,一个cameraParameters对象包含估计的内在和外在参数和失真系数的单一相机。该函数还返回您用于估计相机参数和单相机校准的标准估计误差的图像。的估计估计功能估计外在和内在参数。
[返回stereoParams,pairsUsed,估计识别) = estimateCameraParameters (imagePoints,世界观点)stereoParams,一个stereoParameters对象,该对象包含立体相机的参数。该函数还返回你用来估计立体声参数和立体声摄像机校准的标准估计误差的图像。
Cameraparams.= estimateCameraParameters (___,名称,值)Cameraparams.由一个或多个指定的对象属性名称,值使用前面的任何语法对参数进行配对。未指定的属性有其默认值。
例子
单摄像机标定
创建一组校准图像。
图像= imageSet (fullfile (toolboxdir (“愿景”),“visiondata”,...“校准”,“莫诺”));imageFileNames = images.ImageLocation;
检测校准模式。
[imagePoints, boardSize] = detectCheckerboardPoints(imageFileNames); / /检查全局
生成方块角落的世界坐标。
squareSizeInMM = 29;worldPoints = generateCheckerboardPoints (boardSize squareSizeInMM);
校准相机。
I = readimage(图片1);imageSize = [size(I, 1),size(I, 2)];params = estimateCameraParameters (imagePoints worldPoints,...“图象尺寸”、图象尺寸);
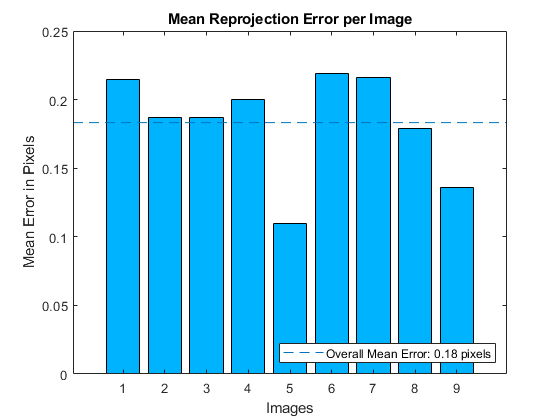
可视化校准精度。
ShowreProiznerErrors(Params);
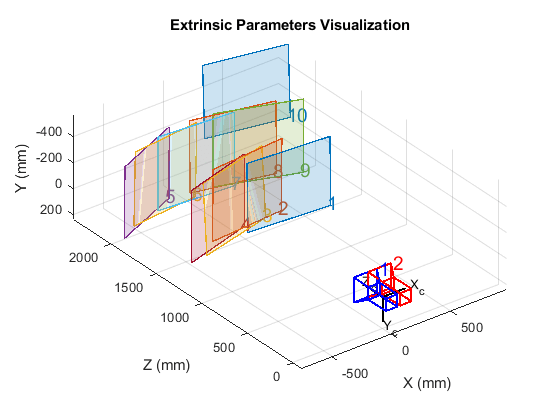
可视化相机外在。
图;showExtrinsics (params);
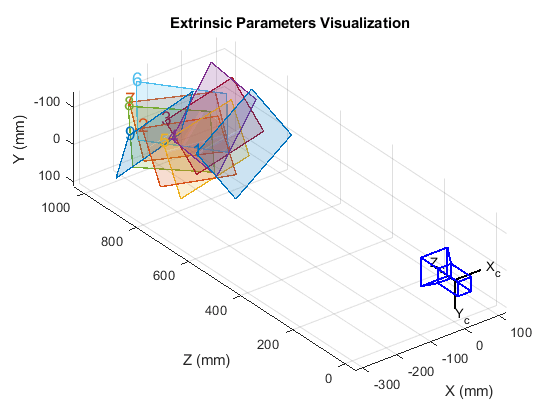
drawnow;
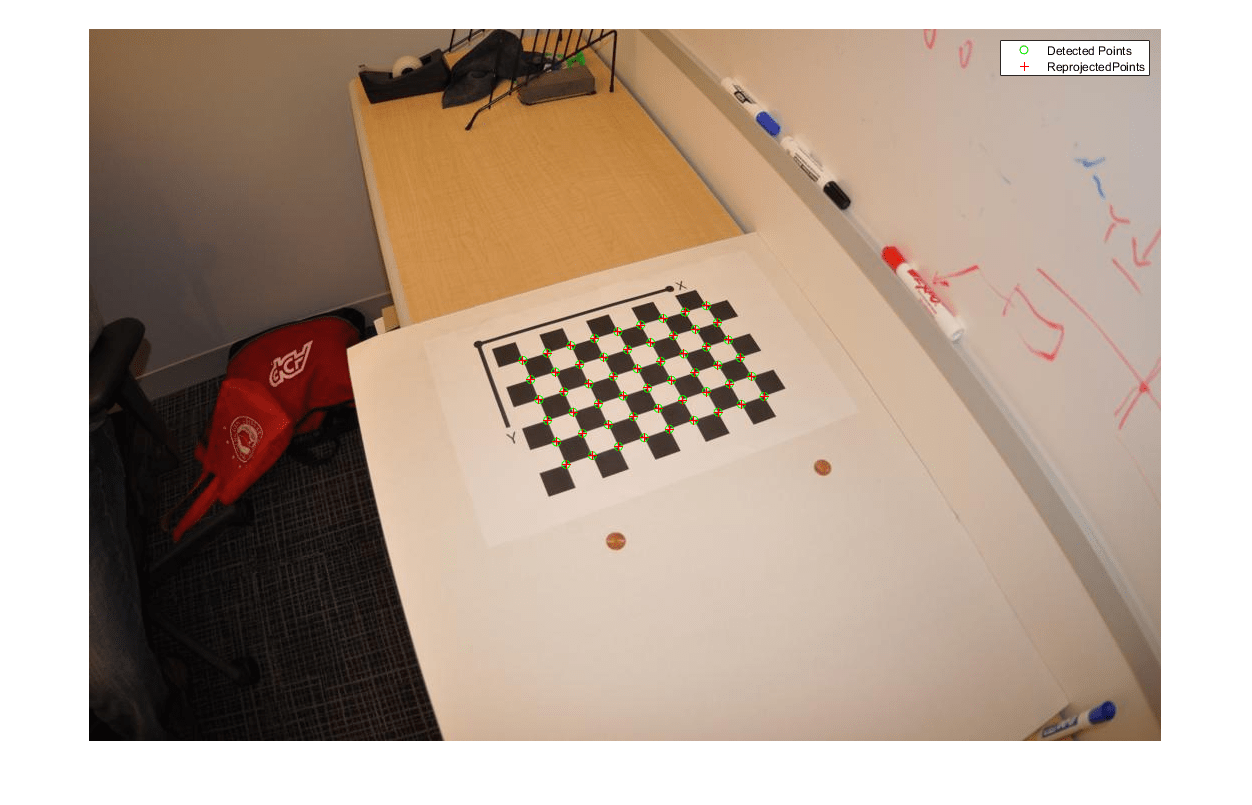
Plot检测和重投影点。
图;imshow(imagefilenames {1});持有在;情节(imagePoints (:, 1, 1), imagePoints (:, 2, 1),“去”);plot(params.reprojectedPoints(:,1,1),params.reprojectedPoints(:,2,1),'r +');传奇(“发现点”,'reprojectedpoints');持有从;
立体相机标定
指定校准图像。
leftImages = imageDatastore (fullfile (toolboxdir (“愿景”),“visiondata”,...“校准”,'立体声',“左”));rightImages = imageDatastore (fullfile (toolboxdir (“愿景”),“visiondata”,...“校准”,'立体声','对'));
检测棋盘格。
[imagePoints, boardSize] =...detectCheckerboardPoints (leftImages.Files rightImages.Files);
指定棋盘关键点的世界坐标。正方形的大小以毫米为单位。
Squaresize = 108;WorldPoints = GenerateCheckerboards(BoardSize,Squarize);
校准立体声相机系统。两个相机都具有相同的分辨率。
i = ReadImage(左幅,1);图像zize = [size(i,1),size(i,2)];params = estimateCameraParameters (imagePoints worldPoints,...“图象尺寸”、图象尺寸);
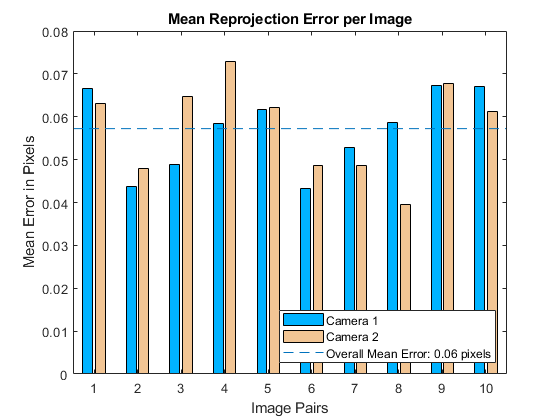
可视化校准精度。
ShowreProiznerErrors(Params);
可视化相机外在。
图;showExtrinsics (params);
输入参数
imagePoints- - - - - -标定模式的关键点
米2 -numImages|米2 -numPairs2数组
校准模式的关键点,指定为[x,y固有图像坐标。
| 校准 | 的输入数组x,y)要点 |
|---|---|
| 单相机 | 米2 -numImages数组的x,y要点。
仅支持部分检测到的图案进行单次摄像头校准。万博1manbetx要在估计中包括部分检测到的模式,请使用[ |
| 立体相机 | 米2 -numPairs-by-2数组[x,y要点。
|
数据类型:单|双倍的
世界观点- - - - - -世界坐标校准模式的关键点
米2数组
标定图形在世界坐标中的关键点,指定为米2组米的数量(x,y世界坐标。图案必须是平面的;因此,z坐标为零。
数据类型:单|双倍的
名称-值对的观点
指定可选的逗号分隔的对名称,值论点。的名字参数名和价值为对应值。的名字必须出现在引号内。可以以任意顺序指定多个名称和值对参数name1,value1,...,namen,valuen.
“WorldUnits”,“毫米”设置世界点单位为毫米。
“WorldUnits”- - - - - -世界要点单位
“毫米”(默认)|字符向量|字符串标量
世界点数单位,指定为逗号分隔对组成“WorldUnits”以及字符向量或字符串标量。
“EstimateSkew”- - - - - -估计歪斜
假(默认)|逻辑标量
估计偏斜,指定为逗号分隔的配对“EstimateSkew”和一个逻辑标量。当您将此属性设置为真正的,该功能估计图像轴偏斜。设置到假,图像轴是完全垂直的,该函数将倾斜度设置为零。
“NumRadialDistortionCoefficients”- - - - - -径向畸变系数数
2(默认)|3.
要估计的径向畸变系数的数目,指定为逗号分隔对组成“NumRadialDistortionCoefficients”和价值2或3..当光线在透镜边缘附近的弯曲比在透镜的光学中心更厉害时,就会发生径向畸变。镜头越小,失真越大。

径向畸变系数是这种畸变的模型。变形点记为(x扭曲的,y扭曲的):
x扭曲的=x(1 +k1*r2+k2*r4+k3.*r6)
y扭曲的=y(1 +k1*r2+k2*r4+k3.*r6)
x,y-未失真的像素位置。x和y处于标准化的图像坐标。通过将识别像素坐标计算归一化图像坐标通过将光学中心转换并以像素以像素分开来计算。因此,x和y是无量纲。
k1,k2,k3.-镜头的径向畸变系数。
r2:x2+y2
通常,两个系数就足以进行校准。对于严重的失真,如广角镜头,您可以选择3个系数包括k3..
“EstimateTangentialDistortion”- - - - - -切向畸变国旗
假(默认)|逻辑标量
切向失真标志,指定为逗号分隔对组成,“EstimateTangentialDistortion”和一个逻辑标量。当您将此属性设置为真正的,该功能估计切向失真。当你设置它假时,切向失真可以忽略不计。
当透镜和图像平面不平行时发生切向失真。切向失真系数模拟这种类型的失真。

变形点记为(x扭曲的,y扭曲的):
x扭曲的=x+ [2 *p1*x*y+p2* (r2+ 2 *x2)]
y扭曲的=y+ (p1* (r2+ 2 *y2) + 2 *p2*x*y]
x,y-未失真的像素位置。x和y处于标准化的图像坐标。通过将识别像素坐标计算归一化图像坐标通过将光学中心转换并以像素以像素分开来计算。因此,x和y是无量纲。
p1和p2- 镜片的切向失真系数。
r2:x2+y2
输出参数
算法
参考
[1] Zhang, Z.“一种灵活的摄像机标定新技术”。模式分析与机器智能学报.Vol。22, No. 11, 2000, pp. 1330-1334。
[2] Heikkila,J和O. Silven。“具有隐式图像校正的四步摄像头校准程序”,IEEE计算机愿景和模式识别国际会议, 1997年。
[3] bouuet, J.Y.,“用于Matlab的摄像机校准工具箱”,加州理工学院计算视觉。Matlab的相机校准工具箱
G. Bradski和A. Kaehler。学习OpenCV:使用OpenCV库的计算机视觉.加州塞瓦斯托波尔:奥莱利,2008。
另请参阅
应用程序
类
功能
你也可以从以下列表中选择一个网站:
