主要内容
showextrinsics.
可视化外部摄影机参数
描述
ShowExtrinsics(渲染单个校准摄影机或校准立体对的外部参数的三维可视化。该功能绘制关于摄像机的校准模式的三维视图。这个Cameraparams.)Cameraparams.输入包含aCameraparameters.那fisheyepearameters.,或立体塔纳米仪对象,哪个估计估计或estismsfisheyearameters.函数返回。
ShowExterinsics功能将校准图案的三维视图显示为凸多边形,其中包含原始校准图像中图案的所有检测关键点。
ShowExtrinsics(使用由指定的样式显示相机外在参数的可视化Cameraparams.那看法)看法输入。
例子
可视化单个相机外在参数
创建一组校准图像。
images = imagedataStore(fullfile(toolboxdir('想象'),'VisionData'那......'校准'那“网络摄像头”)); ImageFileName=images.Files(1:5);
检测校准模式。
[ImagePoints,BoardSize] =侦探校验erboardPoints(ImageFileNames);
生成正方形角点的世界坐标。正方形的大小以毫米为单位。
SquareSide = 25;WorldPoints = GenerateCheckerboards(BoardSize,Squareide);
校准相机。
I=读取图像(图像,1);图像大小=[大小(I,1),大小(I,2)];cameraParams=估计的CameraParameters(图像点、世界点、,......“图像大小”,图片尺寸);
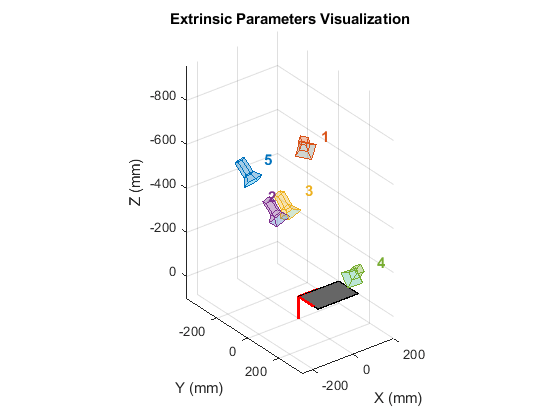
可视化模式位置。
图ShowExtrinsics(CameraParams);

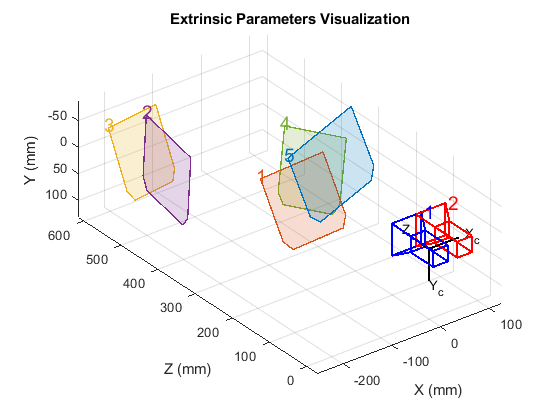
可视化相机位置。
图中显示了外部参数(cameraParams,“以模式为中心”);
可视化立体声对相机外在参数
指定校准图像。
imageDir=完整文件(toolboxdir('想象'),'VisionData'那......'校准'那“立体声”);leffimages = imagedataStore(fullfile(imagedir,“左”));Rightimages = imageageAtastore(fullfile(imagedir,“对”));
检测棋盘。
[imagePoints,boardsize] =侦探校验erboards(......leffimages.files,trainimages.files);
指定Checkerboard Keypoints的世界坐标。方形尺寸为毫米。
Squaresize = 108;WorldPoints = GenerateCheckerboards(BoardSize,Squarize);
校准立体声相机系统。两个相机都具有相同的分辨率。
i = ReadImage(左幅,1);图像zize = [size(i,1),size(i,2)];Cameraparams =估计估计(象育点,WorldPoints)......“图像大小”,图片尺寸);
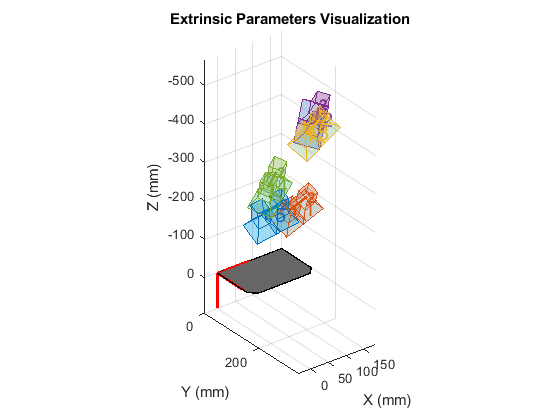
可视化模式位置。
数字;showextrinsics(Cameraparams);
可视化相机位置。
图形显示外部(摄像机参数,“以模式为中心”);
输入参数
输出参数
也可以看看
相机校准器|Cameraparameters.|侦探校验erboardpoints.|估计估计|fisheyepearameters.|generateCheckerboardPoints|Plotcamera.|Showreproizhererrors.|立体摄像机校准器|立体塔纳米仪|undostortimage.
话题
R2014a中引入
您还可以从以下列表中选择网站:
