主要内容
reconstructScene
从视差图重建三维场景
描述
xyzPoints= reconstructScene (disparityMap,stereoParams)stereoParams输入必须与用于校正视差图对应的立体图像的输入相同。
例子
从视差图重建三维场景
加载立体声参数。
负载(“webcamsSceneReconstruction.mat”);
读立体图像对。
I1 = imread (“sceneReconstructionLeft.jpg”);I2 = imread (“sceneReconstructionRight.jpg”);
纠正图像。
[J1, J2] = rectifyStereoImages(I1,I2, stereparams);
显示校正后的图像。
图imshow(猫(j - 1 (:,: 1), J2 (:,: 2:3)),“InitialMagnification”, 50);

计算出差异。
disparityMap = disparitySGM (im2gray (j - 1), im2gray (J2));图imshow (disparityMap [0, 64),“InitialMagnification”, 50);
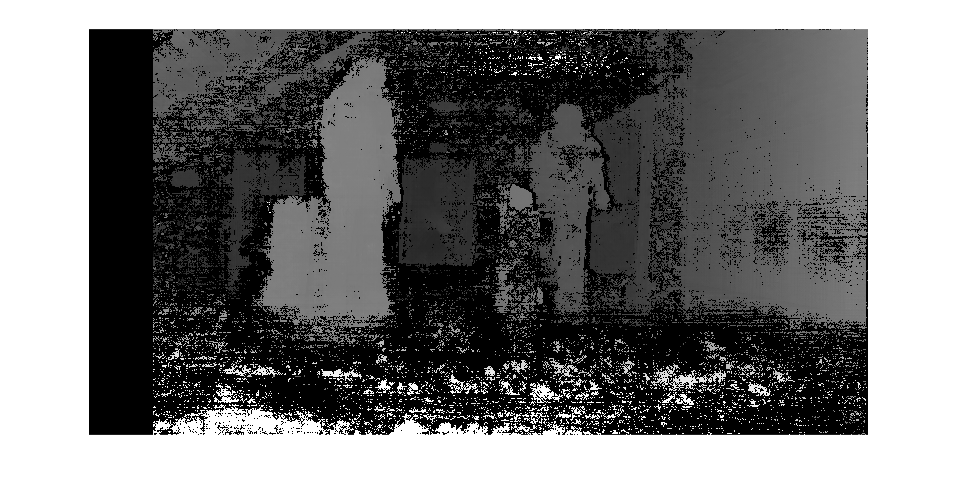
从视差图中重建每个像素对应点的三维世界坐标。
xyzPoints = reconstructScene (disparityMap stereoParams);
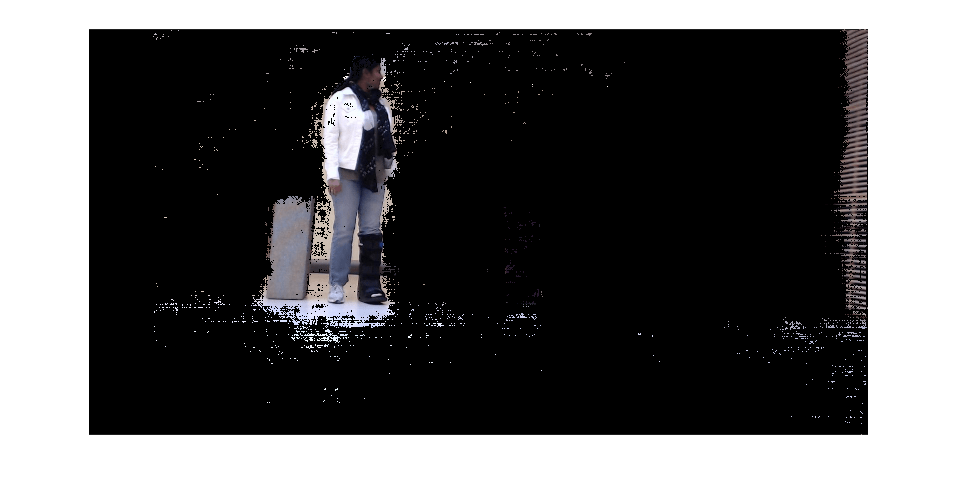
将一个距离摄像机3.2到3.7米的人分开。
Z = xyzPoints (:,:, 3);掩码= repmat(Z > 3200 & Z < 3700,[1,1,3]);j - 1(~面具)= 0;imshow (j - 1,“InitialMagnification”, 50);
输入参数
输出参数
参考文献
Bradski和Kaehler,学习OpenCV:计算机视觉与OpenCV库,塞瓦斯托波尔,CA: O'Reilly, 2008。
扩展功能
另请参阅
功能
对象
介绍了R2014a
你也可以从以下列表中选择一个网站:
