estimateGeometricTransform3D
从匹配点对估计三维几何变换
语法
描述
tform= estimateGeometricTransform3D (matchedPoints1,matchedPoints2,transformType)matchedPoints1从另一组三维点到匹配点中的内联线matchedPoints2.
[另外,使用前面语法中的输入参数返回一个向量,将每个匹配点对指定为内联点或离群点。tform,inlierIndex) = estimateGeometricTransform3D (___)
[另外,返回一个状态代码,指示函数是否可以估计转换,如果不能,为什么会失败。如果不指定tform,inlierIndex,状态) = estimateGeometricTransform3D (___)状态输出时,该函数将返回一个错误,用于无法生成结果的条件。
[___) = estimateGeometricTransform3D (___,使用一个或多个名称-值对参数以及以前语法中的任何参数组合指定其他选项。例如名称,值)“信心”,99年设置查找最大嵌套数的置信值为99.
例子
两点云间的估计变换
将点云文件加载到工作空间中。
ptCloud1 = pcread (“茶壶,铺层”)
ptCloud1 = pointCloud with properties: Location: [41472×3 single] Count: 41472 XLimits: [-3 3.4340] YLimits: [-2 2] ZLimits: [0 3.1500] Color: [] Normal: []
ptCloud1=pcdownsample(ptCloud1,“随机”,0.25);
创建旋转30度的刚性三维变换对象。
θ= 30;%学位Rot = [cosd(theta) sind(theta) 0;...信德(θ)cosd(θ)0;...0 0 1];trans=[0 0];tform=rigid3d(rot,trans);
使用变换对象变换点云。
ptCloud2=pctransform(ptCloud1,tform);
为了引入噪声,在两个点云中添加随机点。
noise1=重缩放(rand(1000,3),-2,2);ptCloud1=点云([ptCloud1.位置;noise1]);noise2=重缩放(rand(1000,3),-2,2);ptCloud2=点云([ptCloud2.位置;noise2]);
想象嘈杂的点云。
图pcshowpair(ptCloud1、ptCloud2)标题(“添加了噪波的点云”)
![]()
从点云中提取匹配点。
matchedPoints1 = ptCloud1.Location;matchedPoints2 = ptCloud2.Location;
估计点云之间的刚性变换。
[tformEst,inlierIndex]=估计几何变换器3D(匹配点1,...matchedPoints2,“刚性”);
提取内部点。
inliersPtCloud1 = transformPointsForward (tformEst matchedPoints1 (inlierIndex:));inliersPtCloud2 = matchedPoints2 (inlierIndex:);
可视化对齐点云的内层。
图firstPtCloud = pointCloud(inliersPtCloud1);secondPtCloud = pointCloud (inliersPtCloud2);pcshowpair (firstPtCloud secondPtCloud)标题(“对齐点云”)
![]()
输入参数
matchedPoints1—第一组匹配的三维点
M-矩阵的by-3[x,Y,Z)坐标
第一组匹配的三维点,指定为M-by-3矩阵,其中每行是一组(x,Y,Z)坐标和M是匹配点的数目。
matchedPoints2—第二组固定的三维点
M-矩阵的by-3[x,Y,Z)坐标
第二组匹配的三维点,指定为M-by-3矩阵,其中每行是一组(x,Y,Z)坐标和M是匹配点的数目。
名称值参数
指定可选的逗号分隔的字符对名称,值参数。名称是参数名和价值为对应值。名称必须出现在引号内。可以以任意顺序指定多个名称和值对参数Name1, Value1,…,的家.
“信心”,99设置查找最大嵌套数的置信值为99.
最大数—最大随机试验
1000(默认)|正整数
随机试验的最大数量,指定为逗号分隔对,包括“MaxNumTrials”和一个正整数。此值指定函数随机尝试查找匹配点对的次数。指定更高的值会导致函数执行额外的计算,这会增加查找内联线的可能性。
数据类型:仅有一个的|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64
信心—找到最大嵌套数目的置信度
99(默认)|积极的数字标量
查找最大内联线数的置信度,指定为逗号分隔对,由“信心”和范围(01100)内的正数值标量。增加此值会导致函数执行额外的计算,从而增加查找更多内联线的可能性。
数据类型:仅有一个的|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64
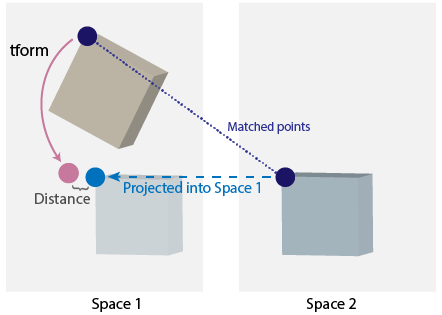
MaxDistance—点到投影的最大距离
1.5(默认)|积极的数字标量
从一个点到对应点的投影的最大距离,指定为由逗号分隔的对组成“最大距离”和一个正数值标量。“最大距离”指定一个点与被视为嵌套点的相应点的投影位置之间的最大距离(以像素为单位)。相应的投影是基于估计变换的。
该函数检查来自的转换matchedPoints1到matchedPoints2,然后计算应用变换后的每对匹配点之间的距离。如果一对匹配点之间的距离大于“最大距离”值,则该对被视为该转换的异常值“最大距离”,则认为这一对是嵌套。
数据类型:仅有一个的|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64
输出参数
算法
该函数使用m估计样本一致性(MSAC)算法排除异常值。MSAC算法是随机样本共识(RANSAC)算法的一种变体。由于MSAC算法的随机性质,每次运行的结果可能不相同。
参考文献
哈特利,理查德和安德鲁·齐瑟曼。计算机视觉中的多视图几何第二版,英国剑桥 ; 纽约:剑桥大学出版社,2003年。
Torr, p.h.s.和A. Zisserman。“MLESAC:一种新的用于估计图像几何的鲁棒估计器”。计算机视觉与图像理解78年,没有。1(2000年4月):138-56。https://doi.org/10.1006/cviu.1999.0832。
扩展能力
你也可以从以下列表中选择一个网站:
