主要内容
detectORBFeatures
检测ORB关键点并返回一个ORBPoints目的
描述
例子
灰度图像中ORB关键点的检测
将图像读入工作区。
我= imread(“businessCard.png”);
将图像转换为灰度图像。
我= im2gray(i);
显示灰度图像。
图imshow(i)
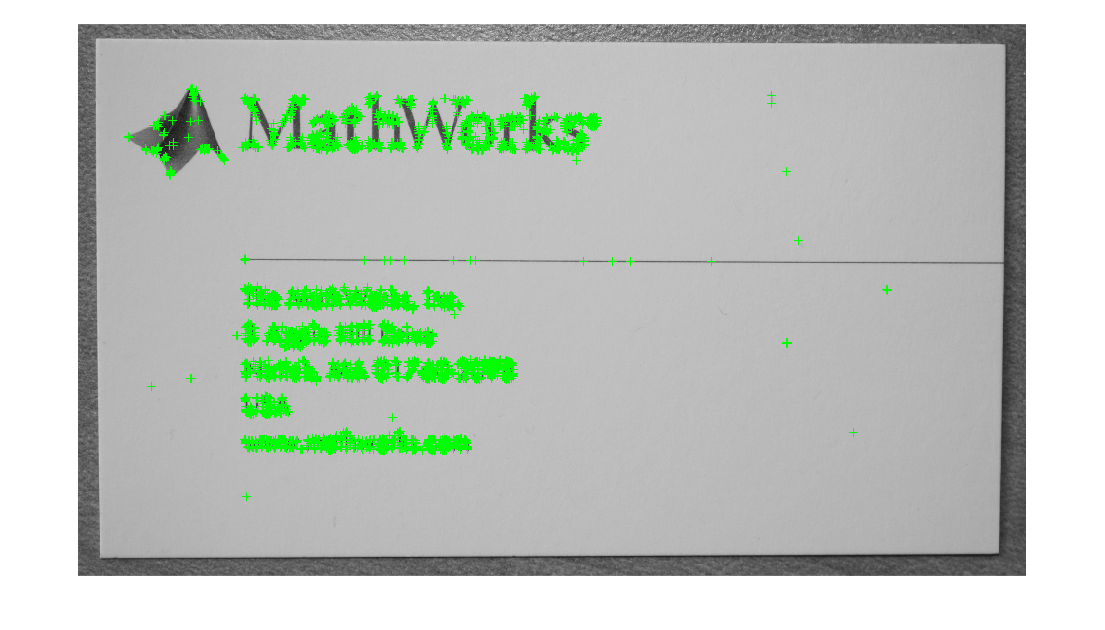
检测和存储ORB关键点。
点= detectORBFeatures(我);
显示灰度图像,绘制检测到的ORB关键点。抑制被检测关键点周围的圆圈显示。ORB关键点检测在强度方差高的区域。
图imshow(i)持有在情节(点,'showscale',假)持有从
在二进制形状图像中检测ORB关键点
将二进制图像读入工作区。
我= imread('star.png');
显示图像。
图imshow(i)
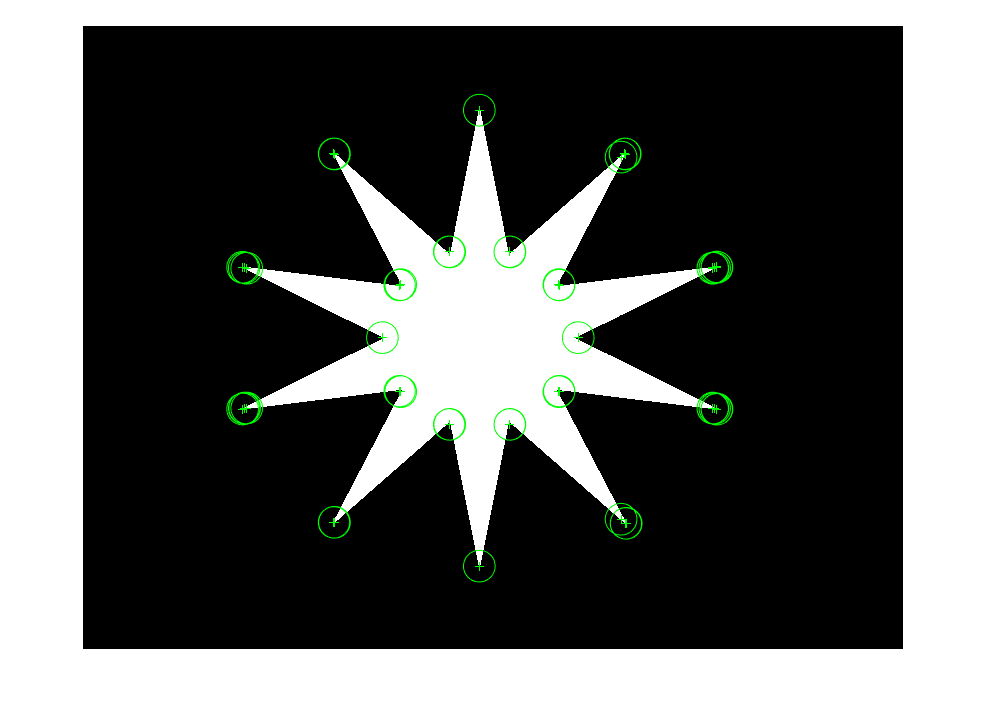
检测和存储ORB关键点。将图像分解的比例因子指定为1.01和分解级别的数量为3。
点= DetectorBfeatures(我,'比例因子', 1.01,'numlevels',3);
显示图像并绘制检测到的ORB关键点。二值形状图像中的拐点被检测为ORB关键点。
图imshow(i)持有在情节(点)从
输入参数
输出参数
算法
该功能通过使用ORB功能检测方法从输入图像中检测关键点[1]。
参考文献
[1] Rublee,E.,V.Rabaud,K. Konolige和G. Bradski。“ORB:筛选或冲浪的有效替代品。”在2011国际计算机视觉会议论文集,2564-2571。巴塞罗那,西班牙:IEEE,2011年。
扩展能力
也可以看看
detectBRISKFeatures|detectFASTFeatures|探测器法|检察官化|侦探训练|检测器饲料|detectSURFFeatures|提取物质|matchFeatures|ORBPoints
在R2019A介绍
你也可以从以下列表中选择一个网站:
