trainrcnnobjectdetector
训练R-CNN深度学习目标检测器
语法
描述
探测器= trainRCNNObjectDetector (培训数据,网络,选择权)
R-CNN的这种实现并不为每个目标类训练支持向量机分类器。
此功能要求您拥有深度学习工具箱™和统计学和机器学习工具箱™。建议您也有并行计算工具箱™与CUDA一起使用®-启用NVIDIA®GPU。有关支持的计算能力的信息,请参见万博1manbetxGPU支万博1manbetx持情况(并行计算工具箱).
探测器= trainRCNNObjectDetector (___,'RegionProposalFcn”,proposalFcn)
例子
火车R-CNN停止标志探测器
加载培训数据和网络层。
加载('rcnnstopsigns.mat',“stopSigns”,'层')
将图像目录添加到MATLAB路径中。
imDir = fullfile (matlabroot,'工具箱',“愿景”,“视觉数据”,...“stopSignImages”); addpath(imDir);
将网络训练选项设置为使用最小批量大小32以减少GPU内存使用。降低InitialLearningRate可降低网络参数的更改速率。这在微调预先训练的网络时非常有用,并可防止网络更改过快。
选项=培训选项(“sgdm”,...“MiniBatchSize”,32,...'italllearnrate',1e-6,...'maxepochs'10);
训练R-CNN探测器。训练可能需要几分钟才能完成。
rcnn = thathrcnnobjectdetector(stopsigns,图层,选项,'负极的贪婪'0.3 [0]);
******************************************************************* 培训一个R-CNN对象探测器以下对象类:* stopSign步骤1的3:从27日训练图像提取区域建议……。步骤2:训练神经网络对训练数据中的对象进行分类…|=========================================================================================| | 时代| |迭代时间| Mini-batch | Mini-batch |基地学习| | | | | | |精度损失速率(秒) | |=========================================================================================| | 50 | 3 | 9.27 | 0.2895 | 0.000001 | 96.88%| | 100 | | 14.77 | 0.2443 | 93.75% | 0.000001 | | 150 | | 20.29 | 0.0013 | 100.00% | 0.000001 | | 200 | | 25.94 | 0.1524 | 0.000001 | 96.88% | |=========================================================================================| 网络训练完成。步骤3:训练每个对象类的边界盒回归模型。R-CNN培训完成。*******************************************************************
在测试图像上测试R-CNN探测器。
img=imread('stopSignTest.jpg');[bbox,score,label] =检测(rcnn,img,“MiniBatchSize”、32);
显示最强的检测结果。
[score, idx] = max(score);Bbox = Bbox (idx,:);注释= sprintf ('%s:(置信度= %f)',标签(idx),分数);detectedImg=插入对象注释(img,'长方形',bbox,annotation);图imshow(检测到的img)

从路径中删除映像目录。
rmpath (imDir);
恢复训练R-CNN目标探测器
使用额外的数据恢复训练R-CNN目标检测器。为了说明这一过程,将使用一半的地面真实数据来初步训练探测器。然后,使用所有的数据恢复训练。
加载训练数据并初始化训练选项。
加载('rcnnstopsigns.mat',“stopSigns”,'层')stopsigns.imageFilename = fullfile(toolboxdir(“愿景”),“视觉数据”,...stopSigns.imageFilename);选项=培训选项(“sgdm”,...“MiniBatchSize”,32,...'italllearnrate',1e-6,...'maxepochs'10,...“冗长”,假);
将R-CNN探测器与地面真相的一部分训练。
rcnn=列车RCNNObjectDetector(停车标志(1:10,:)、图层、选项、,'负极的贪婪'0.3 [0]);
从检测器上获取训练过的网络层。当你将一个网络层数组传递给trainrcnnobjectdetector在美国,它们被原样用于继续培训。
网络= rcnn.network;图层= network.layers;
使用所有培训数据恢复培训。
rcnnFinal = trainRCNNObjectDetector(stopSigns, layers, options);
创建用于多类R-CNN对象检测的网络
为两个对象类创建一个R-CNN对象检测器:狗和猫。
对象类={“狗”,“猫”};
网络必须能够对狗、猫和“背景”类进行分类,以便使用trainrcnnobjectdetector。在此示例中,添加了一个背景。
numClassesPlusBackground = nummel (objectClasses) + 1;
网络的最后一个完全连接的层定义了网络可以分类的类的数量。将最终完全连接的层设置为输出大小等于类数加上背景类。
层=[...imageInputLayer([28 28 1])卷积2dlayer (5,20) fulllyconnectedlayer (numClassesPlusBackground);classificationLayer softmaxLayer () ()];
这些网络层现在可以用来训练一个R-CNN二类目标探测器。
在R-CNN对象检测器中使用保存的网络
创建R-CNN对象检测器并将其设置为使用已保存的网络检查点。在网络培训期间,每纪元保存网络检查站培训选项'CheckPointPath'参数设置。如果您的培训会话意外终止,网络检查站很有用。
加载停止标志训练数据。
加载('rcnnstopsigns.mat',“stopSigns”,'层')
添加图像文件的完整路径。
stopSigns.imageFilename=fullfile(toolboxdir(“愿景”),“视觉数据”,...stopSigns.imageFilename);
使用培训选项函数。
检查点位置=临时目录;选项=培训选项(“sgdm”,“冗长”,错误的,...'checkpoinspath', checkpointLocation);
用几张图片训练R-CNN目标检测器。
rcnn = trainrcnnobjectdetector(stopsigns(1:3,:),图层,选项);
加载保存的网络检查点。
wildcardFilePath = fullfile (checkpointLocation,'convnet_checkpoint __ *。垫子');内容= dir (wildcardFilePath);
加载一个检查点网络。
(1) .folder filepath = fullfile(内容,内容(1). name);检查点=负载(filepath);checkpoint.net
ANS =带有属性的系列网络:图层:[15×1 nnet.cnn.layer.Layer]
创建一个新的R-CNN对象检测器,并设置它使用保存的网络。
rcncheckpoint = rcnnobjectdetector();rcnncheckpoint.regionproposalfcn = @ rcnnobjectdetector.propoSeregions;
将网络设置为保存的网络检查点。
rcnnCheckPoint。网络= checkpoint.net
RCNNCheckPoint = RCNObjectDetector具有属性:网络:[1×1系列网络] ClassNames:{'stopsign''背景'} regionPoposalfcn:@ rcnnobjectdetector.proposeregions
输入参数
培训数据- - - - - -标记的地面真相图像
桌子
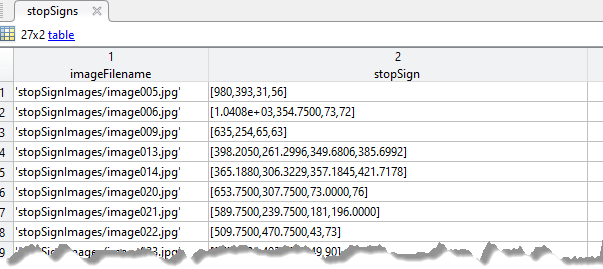
标记的地面真像,指定为一个有两个或更多列的表。
如果使用表,则表必须具有两个或多个列。表的第一列必须包含具有路径的图像文件名。图像必须是灰度或TRUECOLOR(RGB),它们可以以任何格式支持万博1manbetxImread..每个剩余列必须是包含的单元格向量米-B-4表示单个对象类的矩阵,例如车辆,花或停车标志.列包含4个元素的双数组米格式的边界框[x,y,宽度,高度].该格式指定了相应图像中边界框的左上角位置和大小。要创建一个地面真值表,可以使用图片标志应用程序或贴标签机视频要根据生成的地面实况创建训练数据表,请使用objectDetectorTrainingData函数。
表变量名称定义对象类名。要创建地面真相表,请使用图片标志小于32×32的应用程序框不用于培训。
网络- - - - - -网络
SeriesNetwork对象|数组层对象|LayerGraph对象|网络名称
网络,指定为SeriesNetwork(深度学习工具箱),数组层(深度学习工具箱)对象,分层图(深度学习工具箱)对象,或按网络名称。对网络进行训练,以对中定义的对象类进行分类培训数据桌子。的SeriesNetwork(深度学习工具箱),层(深度学习工具箱), 和分层图(深度学习工具箱)对象在深度学习工具箱中可用。
当您将网络指定为
SeriesNetwork,数组层通过添加新的分类和回归层来支持对象检测,网络将自动转换为R-CNN网络。万博1manbetx的数组
层(深度学习工具箱)对象必须包含支持对象类数量的分类层以及背景类。使用此输入类型可自定义每个层的学习速率。示例为万博1manbetx层(深度学习工具箱)对象:layers = [imageInputLayer([28 28 3])卷积2dlayer ([5 5],10) reluLayer() fulllyconnectedlayer (10) softmaxLayer() classificationLayer()];
将网络指定为
SeriesNetwork,层阵列或网络按名称,卷积和完全连接的图层的权重初始化为'窄正常'.网络名称必须是以下有效网络名称之一。您还必须安装相应的加载项。
的
LayerGraph对象必须是有效的R-CNN对象检测网络。您也可以使用LayerGraph对象来训练一个定制的R-CNN网络。
看到开始与R-CNN,快速的R-CNN,更快的R-CNN了解更多有关如何创建R-CNN网络的信息。
选择权- - - - - -培训方案
traingingOptions输出
培训选项,由培训选项(深度学习工具箱)函数来自深度学习工具箱。为网络训练指定求解器和其他选项,请使用培训选项.
请注意
trainrcnnobjectdetector不支持以下培训选项万博1manbetx:
的
ValidationData,验证频率或验证耐心选择权
名称值对参数
指定可选的逗号分隔的对名称,价值参数。名称参数名和价值是相应的价值。名称必须出现在引号内。您可以以任何顺序指定多个名称和值对参数Name1, Value1,…,的家.
“PositiveOverlapRange”,(0.5 - 1).
输出参数
限制
R-CNN的这种实现并不为每个目标类训练支持向量机分类器。
提示
为了加快训练数据的预处理,
trainrcnnobjectdetector自动创建和使用一个并行池基于您的并行偏好设置.这需要并行计算工具箱。VGG-16,VGG-19,Resnet-101和Inception-Resnet-V2是大型型号。使用大图像的培训可能会产生“内存中的错误”错误。要缓解这些错误,请在呼叫之前手动调整图像大小以及边界框地面真实数据
trainrcnnobjectdetector.此功能支持转移学习。万博1manbetx按名称输入网络时,例如
“resnet50”,然后软件根据预先训练的网络自动将网络转换为有效的R-CNN网络模型resnet50(深度学习工具箱)模型。或者,使用该方法手动指定自定义R-CNN网络LayerGraph(深度学习工具箱)从预磨料的DAG网络中提取。看到创建R-CNN对象检测网络.使用
培训选项(深度学习工具箱)函数来启用或禁用详细打印。
参考文献
[1] Girshick,R.,J. Donahue,T. Darrell和J. Malik。“丰富的特征层次结构,用于准确对象检测和语义细分。”计算机视觉与模式识别会议论文集.2014年,页580 - 587。
[2] 快速R-CNNIEEE计算机视觉国际会议记录2015年,第1440-1448页。
兹特尼克,C.劳伦斯和P. Dollar。"边缘框:从边缘定位对象"计算机Vision-ECCV,Springer国际出版。2014,第391-405页。
扩展能力
另请参阅
应用程序
功能
objectDetectorTrainingData|列车快速故障检测器|trainFastRCNNObjectDetector|trainYOLOv2ObjectDetector|resnet50(深度学习工具箱)|培训选项(深度学习工具箱)
对象
图像分类分类器|目标检测器|层(深度学习工具箱)|SeriesNetwork(深度学习工具箱)
您还可以从以下列表中选择一个网站:
