开始与R-CNN,快速的R-CNN,更快的R-CNN
对象检测是在图像中寻找和分类物体的过程。一种深度学习方法,带卷积神经网络的区域(R-CNN),结合了矩形区域的提议和卷积神经网络的特征。R-CNN是一个两阶段的检测算法。第一阶段识别图像中可能包含对象的区域子集。第二阶段对每个区域的对象进行分类。
R-CNN物体探测器的应用包括:
自主驾驶
智能监测系统
面部识别
计算机视觉工具箱™为R-CNN、Fast R-CNN和Faster R-CNN算法提供对象探测器。
实例分割扩展了对象检测,以提供单个检测对象的像素级分割。计算机视觉工具箱提供层,支持实例分割的深度学习方法称为掩码R-CNN。万博1manbetx有关更多信息,请参见开始使用掩码R-CNN进行实例分割.
使用R-CNN算法的目标检测
基于cnn区域的目标检测模型基于以下三个过程:
查找图像中可能包含对象的区域。这些区域被称为地区的建议.
从区域提案中提取CNN特征。
使用提取的特征对对象进行分类。
R-CNN有三种变体。每种变体都试图优化、加速或增强一个或多个这些过程的结果。
R-CNN
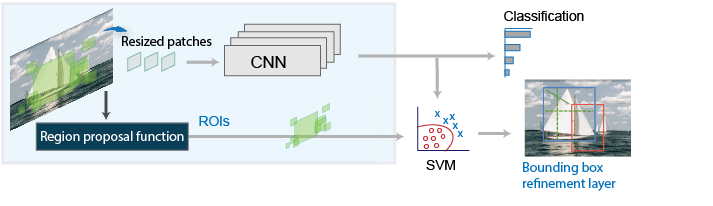
R-CNN探测器[2]首先使用边盒等算法生成区域建议[1].建议区域从图像中裁剪出来并调整大小。然后,CNN对裁剪和调整大小的区域进行分类。最后,利用CNN特征训练的支持向量机(SVM)对区域提议边界框进行精炼。万博1manbetx
使用trainRCNNObjectDetector函数来训练R-CNN对象检测器。函数返回rcnnObjectDetector在图像中检测物体的对象。
快R-CNN
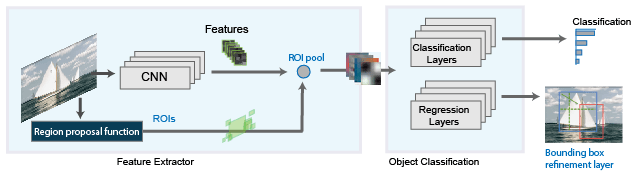
就像R-CNN探测器,快速的R-CNN[3]检测器还使用边缘盒(Edge Boxes)等算法来生成区域建议。不像R-CNN检测器,裁剪和调整区域提议,Fast R-CNN检测器处理整个图像。而R-CNN检测器必须对每个区域进行分类,Fast R-CNN将对应于每个区域提议的CNN特征池。Fast R-CNN比R-CNN更有效,因为在Fast R-CNN检测器中,重叠区域的计算是共享的。
使用trainFastRCNNObjectDetector函数来训练一个快速的R-CNN对象检测器。函数返回fastRCNNObjectDetector从图像中检测物体。
快R-CNN
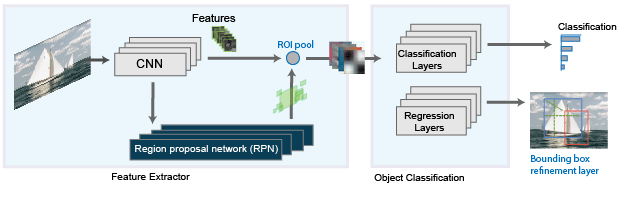
R-CNN越快[4]检测器增加了一个区域建议网络(RPN)来直接在网络中生成区域建议,而不是使用像Edge Boxes这样的外部算法。项使用用于对象检测的锚盒.在网络中生成区域建议更快,并且更好地针对您的数据进行优化。
使用trainFasterRCNNObjectDetector函数训练一个更快的R-CNN对象检测器。函数返回fasterRCNNObjectDetector从图像中检测物体。
R-CNN物体探测器的比较
这类目标探测器使用区域建议来检测图像中的目标。所提出的区域的数量决定了在图像中检测目标所需的时间。Fast R-CNN和Faster R-CNN检测器的设计是为了在大量区域的情况下提高检测性能。
| R-CNN探测器 | 描述 |
|---|---|
trainRCNNObjectDetector |
|
trainFastRCNNObjectDetector |
|
trainFasterRCNNObjectDetector |
|
转移学习
您可以使用预先训练的卷积神经网络(CNN)作为R-CNN检测器的基础,也称为转移学习.看到预先训练的深度神经网络(深度学习工具箱).使用下列网络之一trainRCNNObjectDetector,trainFasterRCNNObjectDetector,或trainFastRCNNObjectDetector功能。要使用任何这些网络,您必须安装相应的深度学习工具箱™模型:
'
alexnet(深度学习工具箱)''
vgg16(深度学习工具箱)''
vgg19(深度学习工具箱)''
resnet50(深度学习工具箱)''
resnet101(深度学习工具箱)''
inceptionv3(深度学习工具箱)''
googlenet(深度学习工具箱)''
inceptionresnetv2(深度学习工具箱)''
squeezenet(深度学习工具箱)'
您还可以根据预先训练的图像分类CNN设计自定义模型。看到设计一个R-CNN,快速的R-CNN,和一个更快的R-CNN模型节和深层网络设计师(深度学习工具箱)应用程序。
设计一个R-CNN,快速的R-CNN,和一个更快的R-CNN模型
您可以根据预先训练的图像分类CNN设计定制的R-CNN模型。你也可以用the深层网络设计师(深度学习工具箱)建立、可视化和编辑一个深度学习网络。
基本的R-CNN模型从一个预先训练的网络开始。最后三个分类层被替换为特定于您想要检测的对象类的新层。
有关如何创建R-CNN对象检测网络的示例,请参见创建R-CNN对象检测网络

Fast R-CNN模型建立在基本R-CNN模型的基础上。通过学习一组方框偏移量,添加方框回归层来改善物体在图像中的位置。在网络中插入感兴趣区域池化层,将每个区域提案的CNN特征池化。
有关如何创建Fast R-CNN对象检测网络的示例,请参见创建快速R-CNN对象检测网络

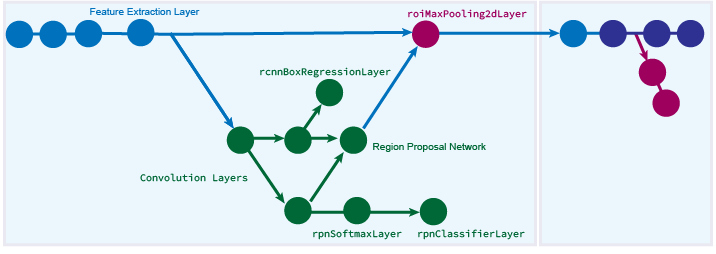
Faster R-CNN模型建立在Fast R-CNN模型的基础上。增加区域提议网络来生成区域提议,而不是从外部算法获取提议。
有关如何创建更快的R-CNN对象检测网络的示例,请参见创建更快的R-CNN对象检测网络



为深度学习标记训练数据
你可以使用图片标志,贴标签机视频,或地面实况贴标签机(自动驾驶工具箱)应用程序交互标签像素和导出标签数据的培训。这些应用程序还可以用于标记用于目标检测的矩形感兴趣区域(roi),用于图像分类的场景标签,以及用于语义分割的像素。要从任何标签导出的ground truth对象创建训练数据,可以使用objectDetectorTrainingData或pixelLabelTrainingData功能。有关详细信息,请参见目标检测和语义分割的训练数据.
参考文献
兹特尼克,C.劳伦斯和P. Dollar。边缘框:从边缘定位对象提案。电脑Vision-ECCV.施普林格国际出版。页391 - 4050。2014.
R.格希克、J.多纳休、T.达雷尔和J.马利克。精确目标检测和语义分割的丰富特征层次2014 IEEE计算机视觉与模式识别会议论文集.页580 - 587。2014
[3] Girshick,罗斯。“快速r-cnn。”IEEE计算机视觉国际会议论文集.2015
任绍庆,何开明,Ross Girshick,孙健更快的R-CNN:面向区域提议网络的实时目标检测神经信息处理系统研究进展.28日,2015卷。
另请参阅
应用程序
功能
trainRCNNObjectDetector|trainFastRCNNObjectDetector|trainFasterRCNNObjectDetector|fasterRCNNObjectDetector|fastRCNNObjectDetector|rcnnObjectDetector
相关的例子
更多关于
- 用于对象检测的锚盒
- MATLAB中的深度学习(深度学习工具箱)
- 预先训练的深度神经网络(深度学习工具箱)
你也可以从以下列表中选择一个网站:
