目标检测和语义分割的训练数据
您可以使用一个标签应用程序和计算机视觉工具箱™对象和功能,从地面真实数据训练算法。使用标签应用程序交互式标签地面真相数据在视频,图像序列,图像收集,或自定义数据源。然后,使用标记的数据创建训练数据来训练目标检测器或训练语义分割网络。
此工作流适用于图片标志和贴标签机视频应用程序只。创建培训数据地面实况贴标签机(自动驾驶工具箱)应用程序在自动驾驶工具箱™,使用gatherLabelData(自动驾驶工具箱)函数。
标注负载数据
图片标志—从文件或文件中加载图像集合
ImageDatastore对象到应用程序中。贴标签机视频-加载一个视频,图像序列,或自定义数据源到应用程序。
标记数据并选择自动化算法:在应用程序中创建ROI和场景标签。
您可以从内置算法中选择一个或创建您自己的自定义算法来标记数据中的对象。要学习如何创建自己的自动化算法,请参见创建标签的自动化算法.
出口标签:标记数据后,可以将标签导出到工作区或保存到文件中。标签导出为a
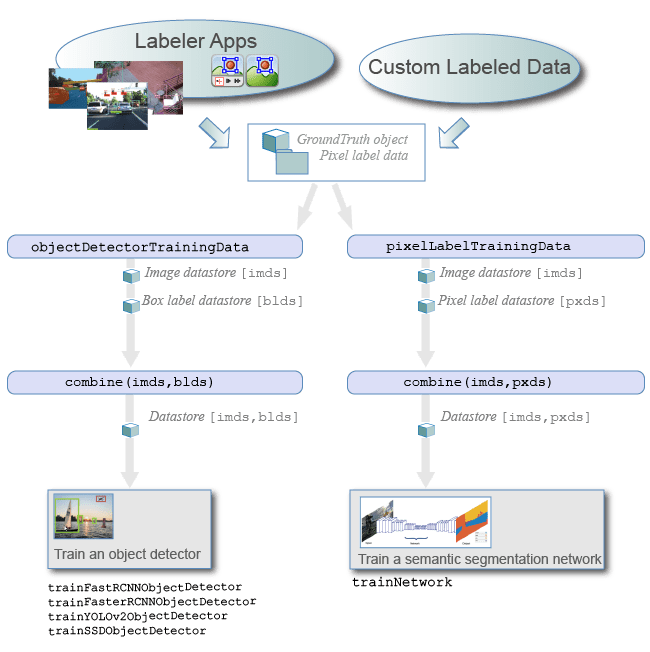
groundTruth对象。如果数据源包含多个图像集合,则对整个图像集合进行标记以获得数组groundTruth对象。分享详情groundTruth对象,参见分享和存储标记地面真相数据.创建培训数据:创建训练数据
groundTruth对象,使用以下函数之一:目标探测器的训练数据
objectDetectorTrainingData函数。用于语义分割网络的训练数据
pixelLabelTrainingData函数。
对于使用视频文件或自定义数据源创建的对象
objectDetectorTrainingData和pixelLabelTrainingData函数将映像写入磁盘groundTruth.通过指定抽样因子对地面真实数据进行抽样。采样可以减轻对类似样本的目标检测器的过度训练。训练算法:
对象探测器 - 使用多个计算机视觉工具箱对象探测器之一。有关探测器列表,请参阅对象检测.有关特定于自动驾驶的对象检测器,请参阅中列出的自动驾驶工具箱对象检测器视觉感知(自动驾驶工具箱).
语义分割网络—关于训练语义分割网络的详细信息,请参见使用深度学习开始语义分割.
另请参阅
应用程序
功能
objectDetectorTrainingData|pixelLabelTrainingData|semanticseg|trainACFObjectDetector|trainFasterRCNNObjectDetector|trainRCNNObjectDetector|trainRCNNObjectDetector|trainSSDObjectDetector|trainYOLOv2ObjectDetector
对象
相关话题
你也可以从以下列表中选择一个网站:
