视觉感知
使用机器学习和深度学习的车道边界、行人、车辆和其他物体检测
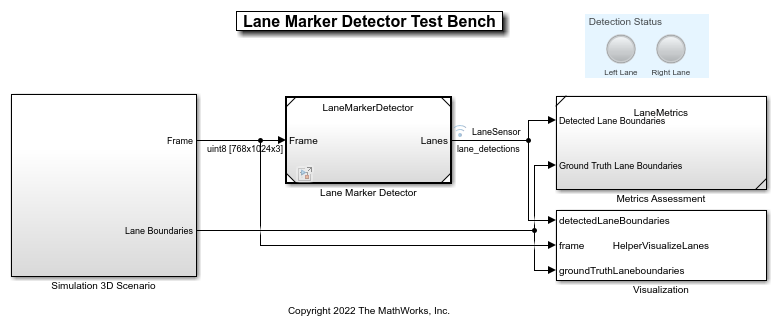
你可以使用机器学习和深度学习技术来检测物体。您还可以使用随机样本共识(RANSAC)算法对抛物线或立方车道边界进行分段、检测和建模。在检测对象之后,使用自动驾驶工具箱™功能评估和可视化检测结果。
功能
特色的例子



您也可以从以下列表中选择一个网站:
你可以使用机器学习和深度学习技术来检测物体。您还可以使用随机样本共识(RANSAC)算法对抛物线或立方车道边界进行分段、检测和建模。在检测对象之后,使用自动驾驶工具箱™功能评估和可视化检测结果。
您也可以从以下列表中选择一个网站: