主要内容
相机传感器配置
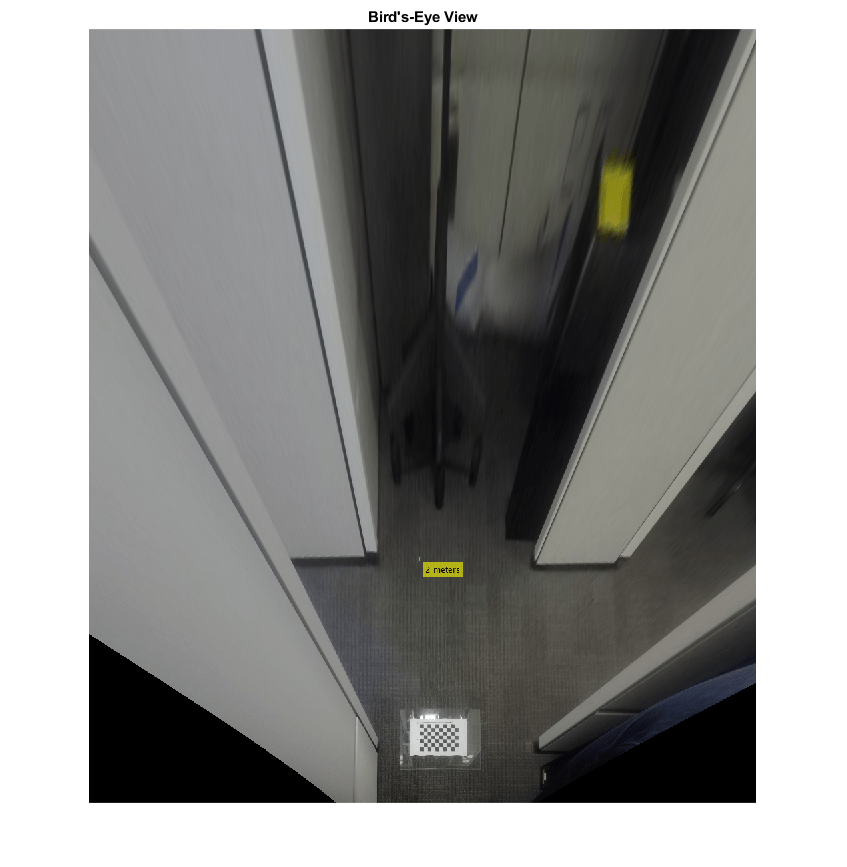
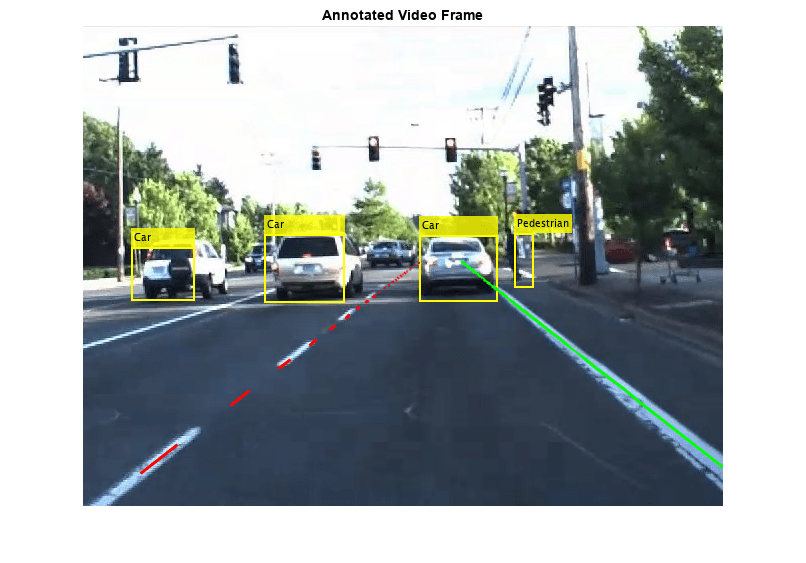
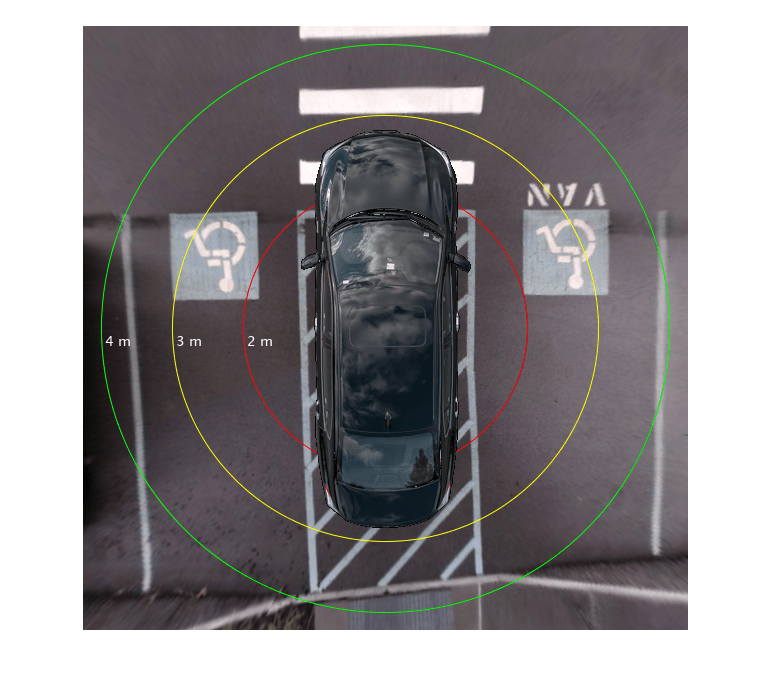
单目摄像机传感器标定,图像-车辆坐标系统转换,鸟瞰图图像转换
在开发单目摄像机传感器的视觉感知算法时,精确的摄像机配置是必不可少的。你可以用monoCamera对象通过定义其内部和外部参数来配置此类传感器。要获得固有参数,请使用相机校准器要获取外部参数,请使用estimateMonoCameraParameters函数。您可以使用配置的monoCamera对象将图像坐标中的位置转换为车辆坐标中的位置。这些转换使您能够估计到自我车辆前面位置的距离。您也可以创建鸟瞰图使用monoCamera对象,您可以使用它来验证您的摄像机配置或作为车道检测算法的一部分。
功能
主题
用棋盘格模式估计单目相机的内在和外在参数。
特色的例子
你也可以从以下列表中选择一个网站:
