主要内容
imageToVehicle
转换图像坐标到车辆坐标
描述
vehiclePoints= imageToVehicle (monoCam,imagePoints)monoCam,包含摄像机参数。
例子
创建单目摄像机对象
在ego车上安装一个前置单目摄像机传感器。检查从相机捕获的图像,并确定在图像中的位置在车辆和图像坐标。
设置相机的内部参数。指定焦距、图像平面的主点和输出图像大小。单位是像素。把本质保留为cameraIntrinsics对象。
focalLength = [800 800];principalPoint = [320 240];imageSize = [480 640];intrinsic = cameraIntrinsics (focalLength principalPoint图象尺寸);
指定摄像机的位置。将相机放置在离地面2.18米高的地方,向地面倾斜14度。
身高= 2.18;距= 14;
使用相机的固有参数和相机的位置定义一个单目相机传感器。从相机加载一个图像。
传感器= monoCamera (intrinsic、身高、“节”、沥青);Ioriginal = imread (“road.png”);图imshow (Ioriginal)标题(原始图像的)

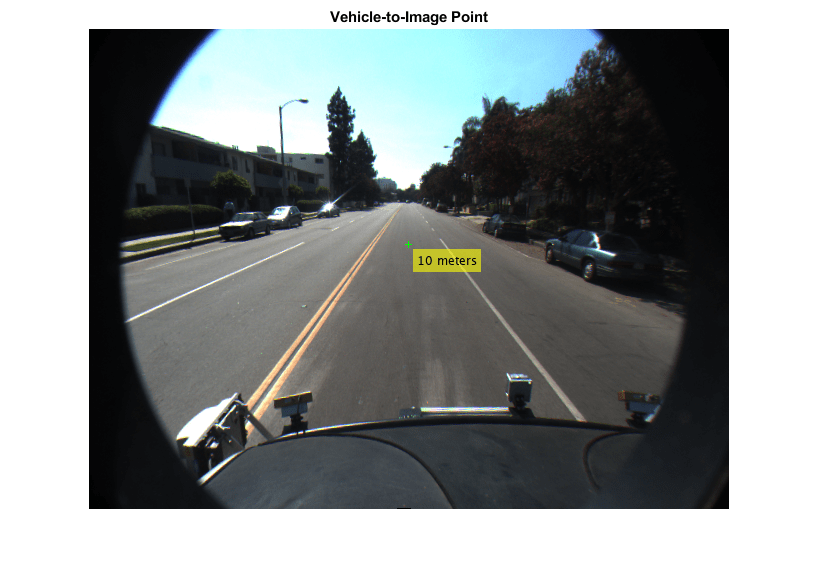
确定相机正前方10米处的图像坐标。的X-轴指向前方的摄像机和Y-axis指向左边。
xyvehiceloc1 = [10 0];xyVehicleLoc1 xyImageLoc1 = vehicleToImage(传感器)
xyImageLoc1 =1×2320.0000 - 216.2296
将点显示在图像上。
IvehicleToImage = insertMarker (Ioriginal xyImageLoc1);IvehicleToImage = insertText(IvehicleToImage,xyImageLoc1 + 5,10米的);图imshow (IvehicleToImage)标题(“Vehicle-to-Image点”)
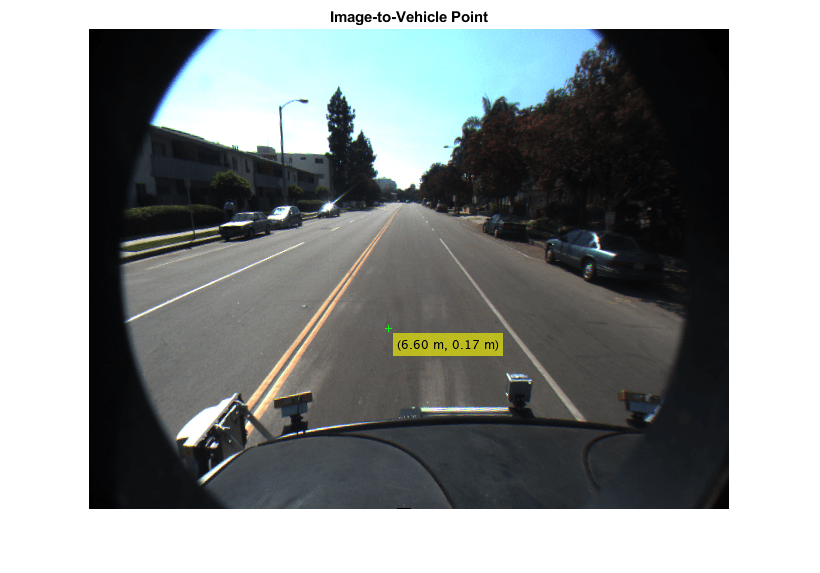
确定图像中路面上某一点的车辆坐标。
xyImageLoc2 = [300 300];xyImageLoc2 xyVehicleLoc2 = imageToVehicle(传感器)
xyVehicleLoc2 =1×26.5959 - 0.1732
该点位于车辆前方约6.6米,车辆中心左侧约0.17米。
在图像上显示该点的车辆坐标。
IimageToVehicle = insertMarker (Ioriginal xyImageLoc2);displayText = sprintf (”(%。% 2 f m。2 f m) ', xyVehicleLoc2);IimageToVehicle = insertText(IimageToVehicle,xyImageLoc2 + 5,displayText);图imshow (IimageToVehicle)标题(“Image-to-Vehicle点”)
输入参数
输出参数
扩展功能
介绍了R2017a
你也可以从以下列表中选择一个网站:
