trainFastRCNNObjectDetector
火车快速R-CNN深学习对象探测器
语法
描述
火车一个检测器
trainedDetector= trainFastRCNNObjectDetector (trainingData,网络,选项)
这个函数需要深度学习工具箱™。也建议您使用CUDA并行计算工具箱™®使英伟达®GPU。关于支持计算能力的信息,看到万博1manbetxGPU的万博1manbetx支持版本(并行计算工具箱)。
(还返回培训进展的信息,如培训损失和准确性,为每个迭代。trainedDetector,信息)= trainFastRCNNObjectDetector (___)
恢复训练一个检测器
trainedDetector= trainFastRCNNObjectDetector (trainingData,检查点,选项)
调整一个检测器
trainedDetector= trainFastRCNNObjectDetector (trainingData,探测器,选项)
自定义区域的建议
trainedDetector= trainFastRCNNObjectDetector (___“RegionProposalFcn”,proposalFcn)proposalFcn,使用任何先前的输入。如果你不指定一个提议函数,那么这个函数使用箱子边缘的一种变体[2]算法。
额外的属性
trainedDetector= trainFastRCNNObjectDetector (___,名称,值)名称,值对参数。
例子
火车快R-CNN停车标志探测器
负荷训练数据。
data =负载(“rcnnStopSigns.mat”,“stopSigns”,“fastRCNNLayers”);stopSigns = data.stopSigns;fastRCNNLayers = data.fastRCNNLayers;
fullpath添加到图像文件。
stopSigns。imageFilename = fullfile (toolboxdir (“愿景”),“visiondata”,…stopSigns.imageFilename);
随机洗牌数据进行训练。
rng (0);shuffledIdx = randperm(高度(stopSigns));stopSigns = stopSigns (shuffledIdx:);
从表中创建一个imageDatastore使用文件。
imd = imageDatastore (stopSigns.imageFilename);
使用标签创建一个boxLabelDatastore从表中列。
建筑物= boxLabelDatastore (stopSigns(:, 2:结束));
结合数据存储。
ds =结合(imd,建筑物);
停车标志训练图像有不同的大小。预处理的数据来调整图像和盒子一个预定义的大小。
ds =变换(ds, @(数据)preprocessData(数据,[920 968 3]));
设置网络培训选项。
选择= trainingOptions (“个”,…“MiniBatchSize”10…“InitialLearnRate”1 e - 3,…“MaxEpochs”10…“CheckpointPath”,tempdir);
火车快速R-CNN探测器。训练可以花几分钟来完成。
frcnn = trainFastRCNNObjectDetector (ds、fastRCNNLayers选项,…“NegativeOverlapRange”,0.1 [0],…“PositiveOverlapRange”(0.7 - 1));
* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *培训快速R-CNN对象探测器以下对象类:* stopSign - - >从训练数据存储中提取区域建议……。培训单一的GPU。| = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = | | | |时代迭代时间| Mini-batch | Mini-batch | Mini-batch |基地学习| | | | (hh: mm: ss) | | |精度损失RMSE |率| | = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = | | 1 | 1 | 00:00:29 | 0.3787 | 93.59% | 0.96 | 0.0010 | | 10 | | 00:05:14 | 0.3032 | 98.52% | 0.95 | 0.0010 | | = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = |检测器训练完成。* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
测试快R-CNN探测器测试图像。
img = imread (“stopSignTest.jpg”);
运行探测器。
[bbox,分数,标签]=检测(frcnn, img);
显示检测结果。
detectedImg = insertObjectAnnotation (img,“矩形”bbox,分数);图imshow (detectedImg)

万博1manbetx支持功能
函数targetSize data = preprocessData(数据)% targetSize调整图像和边界框。规模= targetSize (1:2)。{1}/大小(数据,[1 - 2]);{1}= imresize数据(数据{1},targetSize (1:2));bboxes =圆(数据{2});{2}= bboxresize数据(bboxes、规模);结束
输入参数
trainingData- - - - - -贴上地面实况
数据存储|表
贴上地面真理,指定为一个数据存储或表。
必须将每个边界框的格式(xy宽度高度]。
如果你使用一个数据存储,数据必须设置,以便调用的数据存储
读和readall函数返回一个与两个或三个单元阵列或表列。当输出包含两列,第一列必须包含边界框,和第二列必须包含标签,{盒子,标签}。当输出包含三列,第二列必须包含边界框,第三列必须包含标签。在这种情况下,第一列可以包含任何类型的数据。例如,第一列可以包含图片或点云数据。数据 盒子 标签 第一列可以包含数据,比如点云数据或图像。 第二列必须包含的单元阵列米5矩阵边界框的形式x中心,y中心,宽度,高度,偏航]。向量代表边界框的位置和大小的对象在每一个图像。 第三列必须包含的单元阵列米1分类向量包含对象类的名字。所有分类数据存储返回的数据必须包含相同的类别。 有关更多信息,请参见数据存储深度学习(深度学习工具箱)。
如果你使用一个表,表中必须有两个或两个以上的列。第一列的表必须包含图像文件的名称和路径。图像必须灰度或真彩(RGB),他们可以在任何支持的格式万博1manbetx
imread。剩余的每个列必须包含一个细胞向量米4矩阵代表一个对象类,如车辆,花,或停车标志。列包含第4单元阵列的两倍米边界框的格式(x,y,宽度,高度]。格式指定边界框的左上角位置和大小在相应的形象。创建一个地面真值表,您可以使用图片标志应用程序或贴标签机视频应用。创建一个表的训练数据生成的地面实况,使用objectDetectorTrainingData函数。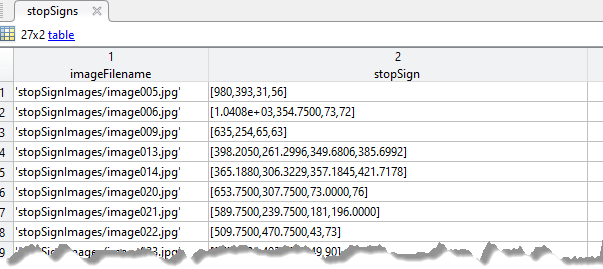

网络- - - - - -网络
SeriesNetwork对象|的数组层对象|LayerGraph对象|网络名称
网络,作为一个指定SeriesNetwork(深度学习工具箱)一个数组的层(深度学习工具箱)对象,layerGraph(深度学习工具箱)对象,或通过网络名称。网络训练分类中定义的对象类trainingData表。的SeriesNetwork(深度学习工具箱),层(深度学习工具箱),layerGraph(深度学习工具箱)深度学习工具箱对象是可用的。
当你指定网络
SeriesNetwork一个数组的层对象,或通过网络名称,网络会自动转换成快速R-CNN网络通过添加一个ROI马克斯池层,和新的分类和回归层支持对象检测。万博1manbetx此外,GridSize财产的ROI马克斯池层是设置为最后的输出大小马克斯汇聚层网络。的数组
层(深度学习工具箱)对象必须包含一个分类层支持对象类的数量,加上背景类。万博1manbetx使用这个输入类型定制每一层的学习速率。一个数组的例子层(深度学习工具箱)对象:层= [imageInputLayer([3] 28日28日)convolution2dLayer (5 [5], 10) reluLayer () fullyConnectedLayer (10) softmaxLayer () classificationLayer ());
当你指定网络
SeriesNetwork,层数组,或网络的名字,权重为您添加额外的卷积和全层创建网络初始化“narrow-normal”。网络名称必须是以下有效的网络名称。您还必须安装相应的插件。
网络名称 特征提取层名称 ROI池层OutputSize 描述 alexnet(深度学习工具箱)“relu5”(6 - 6) 去年马克斯池层是取代了ROI马克斯池层 vgg16(深度学习工具箱)“relu5_3”7 [7] vgg19(深度学习工具箱)“relu5_4”squeezenet(深度学习工具箱)“fire5-concat”(14日14) resnet18(深度学习工具箱)“res4b_relu”ROI池层特征提取后插入层。 resnet50(深度学习工具箱)“activation_40_relu”resnet101(深度学习工具箱)“res4b22_relu”googlenet(深度学习工具箱)“inception_4d-output”mobilenetv2(深度学习工具箱)“block_13_expand_relu”inceptionv3(深度学习工具箱)“mixed7”17 [17] inceptionresnetv2(深度学习工具箱)“block17_20_ac”的
LayerGraph对象必须是一个有效的快速R-CNN对象检测网络。你也可以使用LayerGraph对象来训练一个定制的快速R-CNN网络。提示
如果你的网络是一个
DAGNetwork,可以使用layerGraph(深度学习工具箱)网络转换成一个函数LayerGraph对象。然后,创建一个自定义快速R-CNN网络所描述的创建快速R-CNN对象检测网络的例子。
看到开始使用R-CNN、快速R-CNN和R-CNN更快了解更多关于如何创建一个快速R-CNN网络。
选项- - - - - -培训方案
trainingOptions输出
训练选项,返回的trainingOptions(深度学习工具箱)从深度学习工具箱函数。指定网络培训解决者和其他选项,使用trainingOptions。
请注意
trainFastRCNNObjectDetector不支持这些训练选项万博1manbetx:
的
trainingOptions“一次”和“every-epoch”洗牌选项不支持数据存储输入相结合。万博1manbetx的
trainingOptions“平行”和“multi-gpu”ExecutionEnvironment选项不支持当你使用数据存储输入相万博1manbetx结合。当你设置不支持数据存储的输入万博1manbetx
DispatchInBackground培训选项真正的。
检查点- - - - - -保存探测器检查点
fastRCNNObjectDetector对象
救了探测器检查点,指定为一个fastRCNNObjectDetector对象。保存探测器每个时代后,设置“CheckpointPath”财产在使用trainingOptions函数。拯救一个检查站后每一个时代都是推荐的,因为网络训练可以花费几个小时。
加载一个检查点之前训练检测器,加载MAT-file检查点的路径。例如,如果“CheckpointPath”的属性选项是“/ tmp”,加载一个检查站MAT-file使用:
data =负载(“/ tmp / faster_rcnn_checkpoint__105__2016_11_18__14_25_08.mat”);
的名字MAT-file包括探测器时的迭代的数量和时间戳检查点得救了。保存在探测器探测器文件的变量。通过这个文件回trainFastRCNNObjectDetector功能:
frcnn = trainFastRCNNObjectDetector (stopSigns,…data.detector选项);
探测器- - - - - -以前训练快速R-CNN对象探测器
fastRCNNObjectDetector对象
以前训练快速R-CNN对象探测器,指定为一个fastRCNNObjectDetector对象。
proposalFcn- - - - - -地区的建议方法
函数处理
地区的建议方法,指定为一个函数处理。如果你不指定一个区域建议函数,函数实现EdgeBoxes的一种变体[2]算法。函数必须形式:
[bboxes,分数]= proposalFcn(我)
输入,我,是一个图像中定义trainingData表。函数必须返回矩形框,bboxes,在一个米4数组。每一行的bboxes包含一个研制出向量,(x, y,宽度、高度)。这个向量指定边界框的左上角和大小像素。函数必须返回一个为每一个边界框在一个分数米1的向量。更高的分数值表明,边界框更有可能包含一个对象。用于选择最强的得分n地区,n被定义为的价值NumStrongestRegions。
依赖关系
如果你不指定一个自定义建议功能和使用一个表输入训练数据时,该函数使用一个盒子边缘算法的变异。如果您使用多通道图像的输入训练数据的数据存储,您必须指定一个自定义区域建议功能。
名称-值对的观点
指定可选的逗号分隔条名称,值参数。的名字参数名称和吗价值相应的价值。的名字必须出现在引号。您可以指定几个名称和值对参数在任何顺序Name1, Value1,…,的家。
“PositiveOverlapRange”, (0.75 - 1)
输出参数
提示
为训练加速数据预处理,
trainFastRCNNObjectDetector自动创建并使用一个平行池基于并行的偏好设置。关于这些首选项设置的更多细节,请参阅平行的偏好设置。使用并行计算偏好需要并行计算工具。VGG-16、VGG-19 resnet - 101和Inception-ResNet-v2大型模型。训练和大图像能产生“内存溢出”错误。为了减轻这些错误,试着一个或多个选项:
减少使用的图像的大小
SmallestImageDimension”的论点。减少的价值”
NumRegionsToSample”名称参数值。
这个函数支持转移学习。万博1manbetx当你输入一个
网络的名字,等“resnet50”,那么函数自动将网络转换成一个有效的快速的基于pretrained R-CNN网络模型resnet50(深度学习工具箱)模型。另外,手动指定一个自定义快速R-CNN网络使用LayerGraph(深度学习工具箱)从一个pretrained DAG网络。更多细节,请参阅创建快速R-CNN对象检测网络。此表描述了如何将每个命名网络转换成一个快速R-CNN网络。特征提取层名称指定层由ROI池处理层。ROI的输出大小指定大小的ROI池的特征图谱输出层。
网络名称 特征提取层名称 ROI池层OutputSize 描述 alexnet(深度学习工具箱)“relu5”(6 - 6) 去年马克斯池层是取代了ROI马克斯池层 vgg16(深度学习工具箱)“relu5_3”7 [7] vgg19(深度学习工具箱)“relu5_4”squeezenet(深度学习工具箱)“fire5-concat”(14日14) resnet18(深度学习工具箱)“res4b_relu”ROI池层特征提取后插入层。 resnet50(深度学习工具箱)“activation_40_relu”resnet101(深度学习工具箱)“res4b22_relu”googlenet(深度学习工具箱)“inception_4d-output”mobilenetv2(深度学习工具箱)“block_13_expand_relu”inceptionv3(深度学习工具箱)“mixed7”17 [17] inceptionresnetv2(深度学习工具箱)“block17_20_ac”修改和网络转换成一个快速R-CNN网络,看到的设计一个R-CNN、快速R-CNN和更快的R-CNN模型。
使用
trainingOptions(深度学习工具箱)函数来启用或禁用详细打印。
引用
[1]Girshick,罗斯。“快速R-CNN。”《IEEE计算机视觉国际会议。2015年。
[2]Zitnick c·劳伦斯,彼得亚雷美元。“边缘盒:从边缘定位对象的建议。”电脑Vision-ECCV 2014。施普林格国际出版,2014年,页391 - 405。
扩展功能
另请参阅
应用程序
功能
estimateAnchorBoxes|objectDetectorTrainingData|trainFasterRCNNObjectDetector|trainRCNNObjectDetector|trainingOptions(深度学习工具箱)
对象
boxLabelDatastore|fastRCNNObjectDetector|层(深度学习工具箱)|SeriesNetwork(深度学习工具箱)
主题
- 锚箱对象检测
- 开始使用R-CNN、快速R-CNN和R-CNN更快
- 数据存储深度学习(深度学习工具箱)
